参考链接
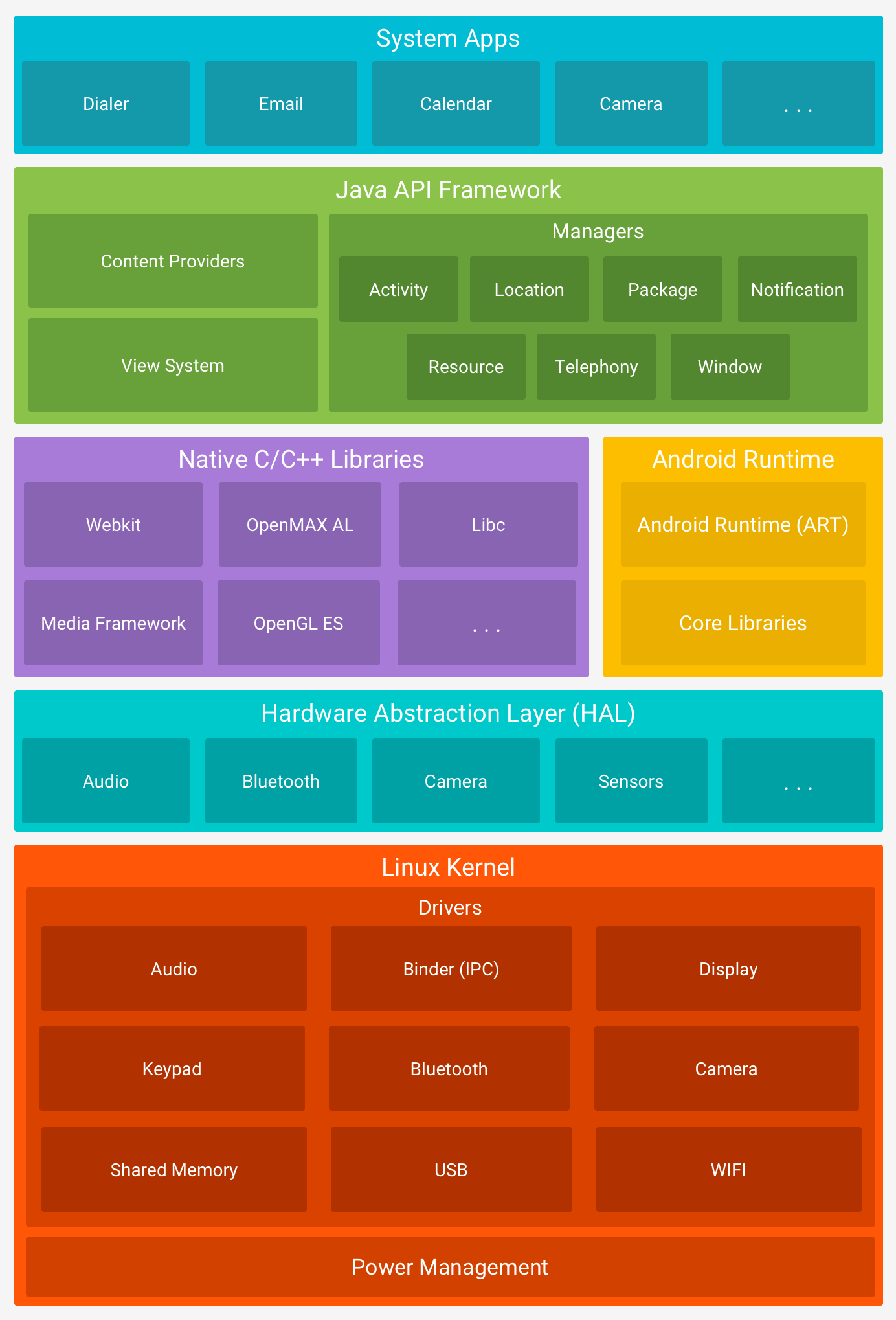
Android 架构图-Gityuan
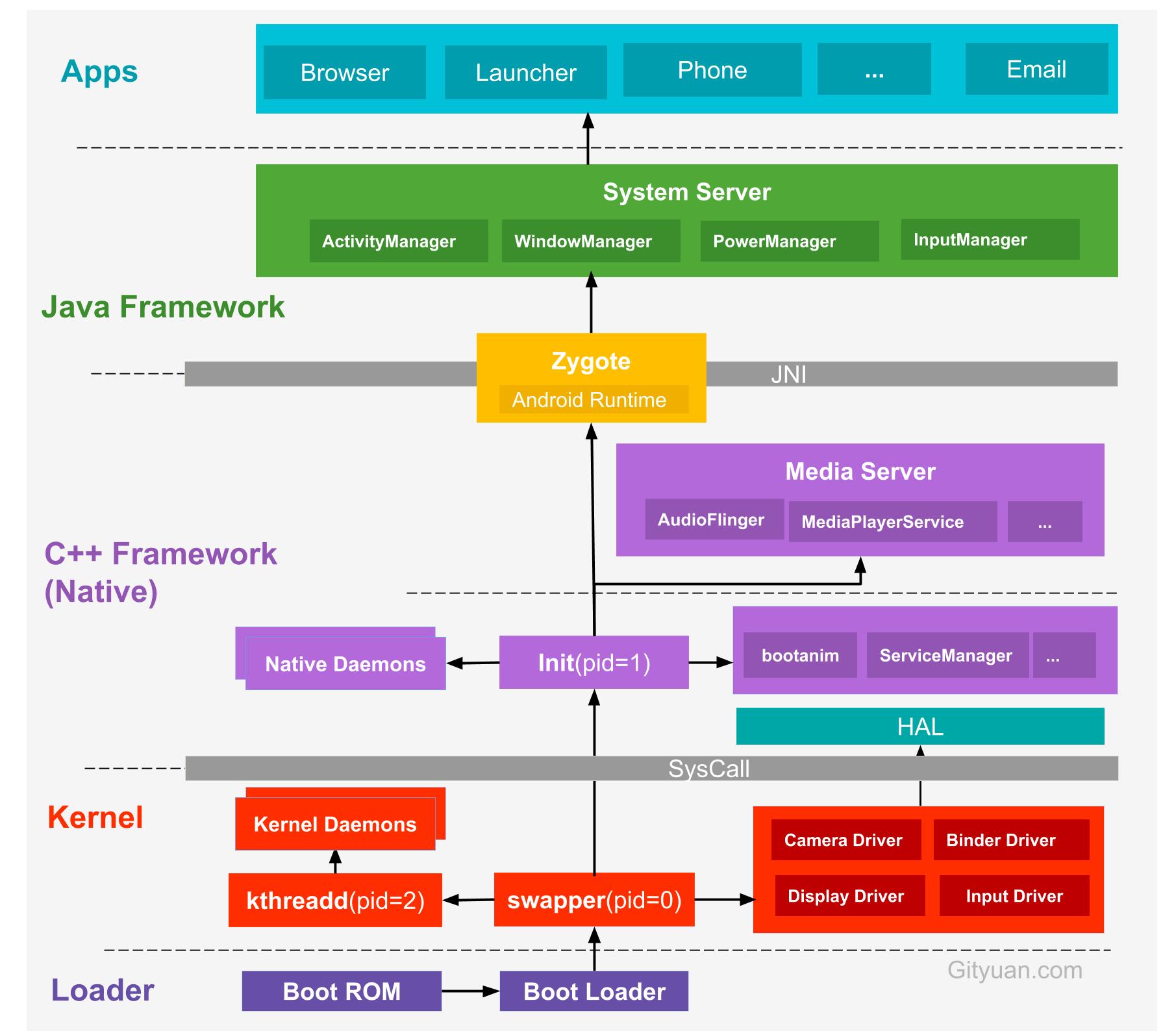
Android 启动架构图-Gityuan
init 进程
init进程是Linux系统中用户空间的第一个进程,进程号固定为1。Kernel启动后,在用户空间启动init进程,并调用init中的main()方法执行init进程的职责。对于init进程的功能分为4部分:
- 解析并运行所有的init.rc相关文件
- 根据rc文件,生成相应的设备驱动节点
- 处理子进程的终止(signal方式)
- 提供属性服务的功能
代码
int main(int argc, char** argv) {
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (!strcmp(basename(argv[0]), "watchdogd")) {
return watchdogd_main(argc, argv);
}
//设置文件属性0777
// Clear the umask.
umask(0);
add_environment("PATH", _PATH_DEFPATH);
bool is_first_stage = (argc == 1) || (strcmp(argv[1], "--second-stage") != 0);
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
if (is_first_stage) {
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
mount("sysfs", "/sys", "sysfs", 0, NULL);
}
// We must have some place other than / to create the device nodes for
// kmsg and null, otherwise we won't be able to remount / read-only
// later on. Now that tmpfs is mounted on /dev, we can actually talk
// to the outside world.
open_devnull_stdio();
// 初始化内核log,位于节点/dev/kmsg
klog_init();
// 设置输出的log级别
klog_set_level(KLOG_NOTICE_LEVEL);
NOTICE("init %s started!\n", is_first_stage ? "first stage" : "second stage");
if (!is_first_stage) {
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
// 创建一块共享的内存空间,用于属性服务
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
export_kernel_boot_props();
}
// Set up SELinux, including loading the SELinux policy if we're in the kernel domain.
selinux_initialize(is_first_stage);
// If we're in the kernel domain, re-exec init to transition to the init domain now
// that the SELinux policy has been loaded.
if (is_first_stage) {
if (restorecon("/init") == -1) {
ERROR("restorecon failed: %s\n", strerror(errno));
security_failure();
}
char* path = argv[0];
char* args[] = { path, const_cast<char*>("--second-stage"), nullptr };
if (execv(path, args) == -1) {
ERROR("execv(\"%s\") failed: %s\n", path, strerror(errno));
security_failure();
}
}
// These directories were necessarily created before initial policy load
// and therefore need their security context restored to the proper value.
// This must happen before /dev is populated by ueventd.
NOTICE("Running restorecon...\n");
restorecon("/dev");
restorecon("/dev/socket");
restorecon("/dev/__properties__");
restorecon("/property_contexts");
restorecon_recursive("/sys");
// 初始化epoll功能
epoll_fd = epoll_create1(EPOLL_CLOEXEC);
if (epoll_fd == -1) {
ERROR("epoll_create1 failed: %s\n", strerror(errno));
exit(1);
}
// 初始化子进程退出的信号处理函数,并调用epoll_ctl设置signal fd可读的回调函数
signal_handler_init();
// 加载default.prop文件
property_load_boot_defaults();
export_oem_lock_status();
// 启动属性服务器,此处会调用epoll_ctl设置property fd可读的回调函数
start_property_service();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
Parser& parser = Parser::GetInstance();
parser.AddSectionParser("service",std::make_unique<ServiceParser>());
parser.AddSectionParser("on", std::make_unique<ActionParser>());
parser.AddSectionParser("import", std::make_unique<ImportParser>());
// 解析init.rc文件
parser.ParseConfig("/init.rc");
ActionManager& am = ActionManager::GetInstance();
// 执行rc文件中触发器为on early-init的语句
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
// 等冷插拔设备初始化完成
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
// 设备组合键的初始化操作,此处会调用epoll_ctl设置keychord fd可读的回调函数
am.QueueBuiltinAction(keychord_init_action, "keychord_init");
// 屏幕上显示Android静态Logo
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
// 执行rc文件中触发器为on init的语句
am.QueueEventTrigger("init");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
// Don't mount filesystems or start core system services in charger mode.
// 当处于充电模式,则charger加入执行队列;否则late-init加入队列。
std::string bootmode = property_get("ro.bootmode");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else if (strncmp(bootmode.c_str(), "ffbm", 4) == 0) {
NOTICE("Booting into ffbm mode\n");
am.QueueEventTrigger("ffbm");
} else {
am.QueueEventTrigger("late-init");
}
// 触发器为属性是否设置
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
if (!waiting_for_exec) {
am.ExecuteOneCommand();
// 根据需要重启服务
restart_processes();
}
int timeout = -1;
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (am.HasMoreCommands()) {
timeout = 0;
}
bootchart_sample(&timeout);
epoll_event ev;
// 循环等待事件发生
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, timeout));
if (nr == -1) {
ERROR("epoll_wait failed: %s\n", strerror(errno));
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
init进程执行完成后进入循环等待epoll_wait的状态。
小结
0
次点赞