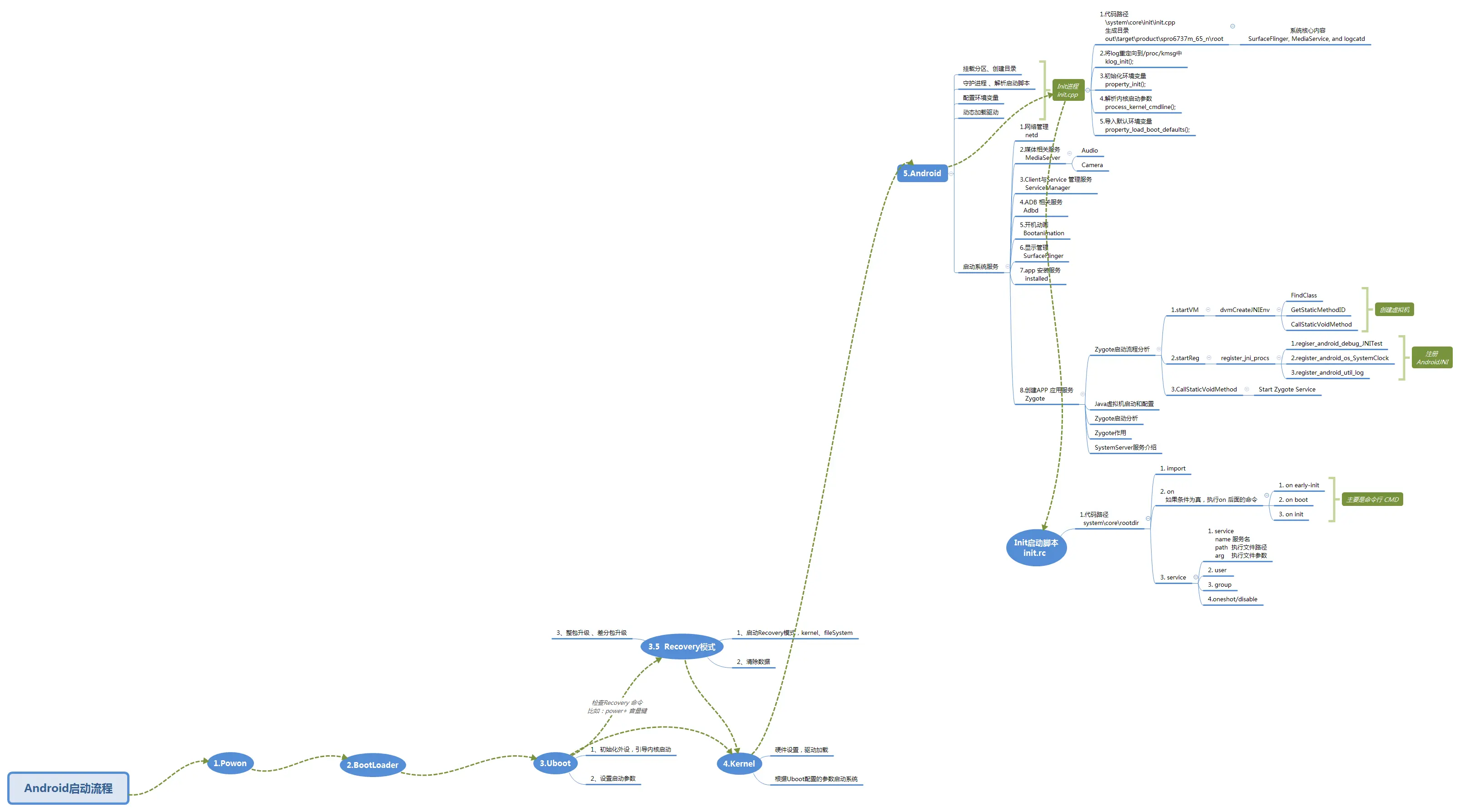
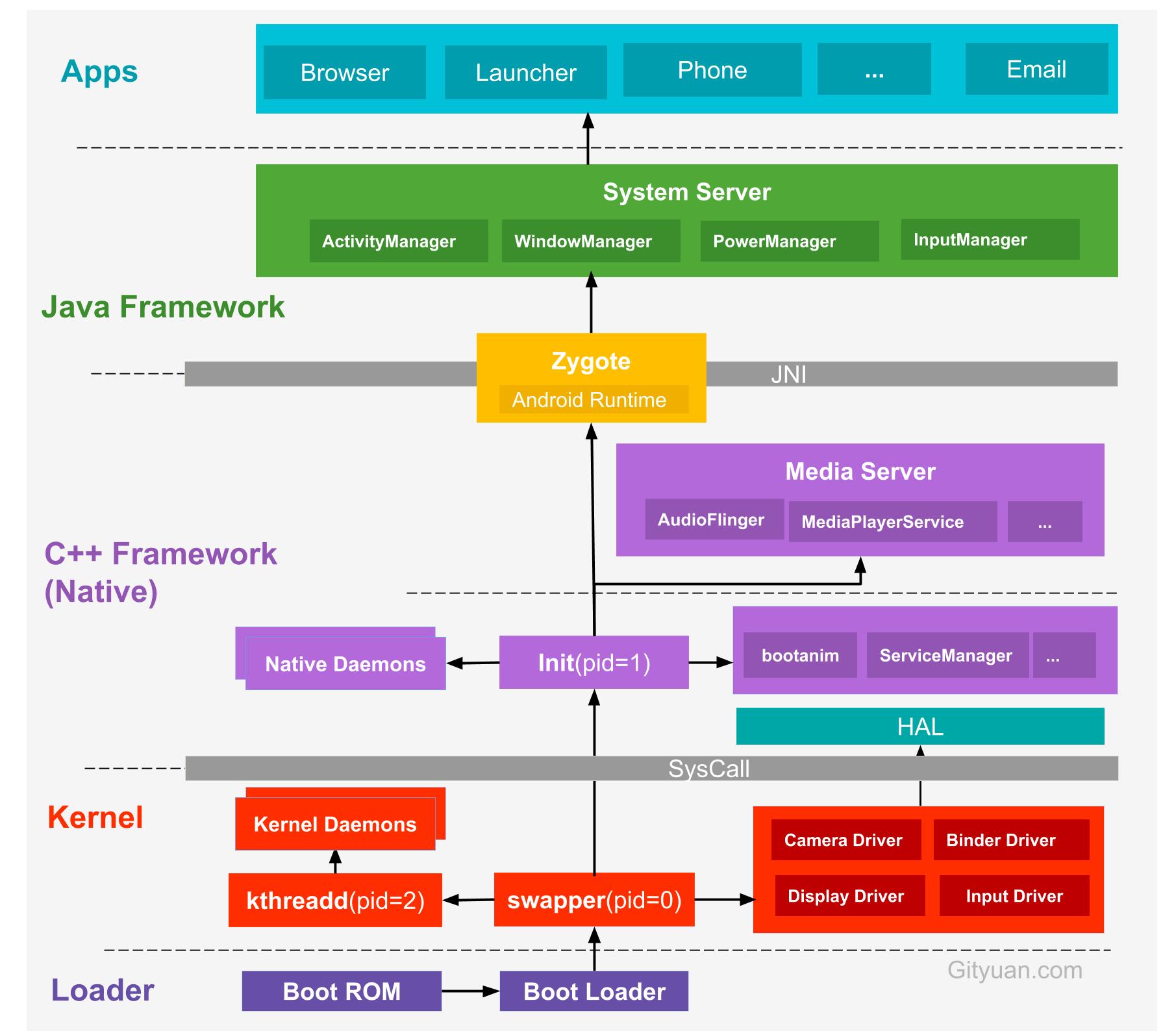
框架图
BootLoader
从Power键上电到U-boot流程
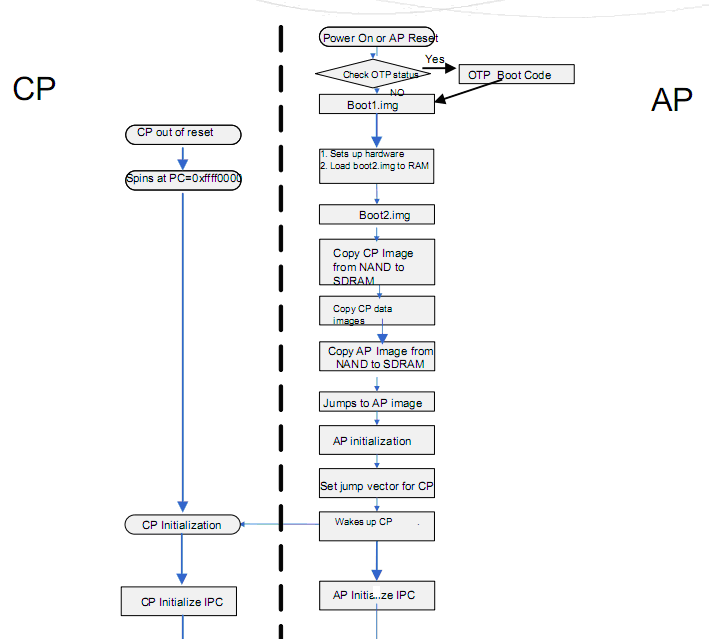
当uboot(fastboot)被装载后便开始运行,它一般会先检测用户是否按下某些特别按键,这些特别按键是uboot在编译时预先被约定好的,用于进入调试模式。 如果用户没有按这些特别的按键,则uboot会从NAND Flash中装载Linux内核,装载的地址是在编译uboot时预先约定好的。
Kernel
自解压过程
kernel/msm-4.19/arch/arm/boot/compressed
Linux初始化
- 设置体系结构相关的环境
- 初始化内存结构
- 开启MMU、建立页表
- 创建异常向量表和初始化中断处理函数
- 初始化系统核心进程调度器和时钟中断处理程序
- 初始化串口控制台
- 创建初始化系统cache
- 初始化内存管理
- 初始化系统的进程间通信机制
- 挂载根文件系统
Init启动
- 启动init服务 /bin/init /etc/init
- 启动udev
- 设置内核参数
- 设置系统时间
- 启动交换内存空间
- 检查并挂载所有文件系统
- 初始化硬件设备
- 初始化串行端口设备
- 建立用户接口
- 建立虚拟控制台
init进程
android P /system/core/init/init.cpp
int main(int argc, char** argv) {
// ------------------------------------------------------------------------------
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (!strcmp(basename(argv[0]), "watchdogd")) {
return watchdogd_main(argc, argv);
}
if (argc > 1 && !strcmp(argv[1], "subcontext")) {
InitKernelLogging(argv);
const BuiltinFunctionMap function_map;
return SubcontextMain(argc, argv, &function_map);
}
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
//---------------------------------------------------------------------------------------
// 是否是第一次启动
bool is_first_stage = (getenv("INIT_SECOND_STAGE") == nullptr);
if (is_first_stage) {
boot_clock::time_point start_time = boot_clock::now();
// 设置进程创建的文件属性为0777
// Clear the umask.
umask(0);
// 设置环境变量地址
clearenv();
setenv("PATH", _PATH_DEFPATH, 1);
// 创建一些基本目录
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
// 基于内存的虚拟文件系统
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
// 基于内存的虚拟文件系统,内核内部数据结构的接口
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
// Don't expose the raw commandline to unprivileged processes.
chmod("/proc/cmdline", 0440);
gid_t groups[] = { AID_READPROC };
setgroups(arraysize(groups), groups);
// 和proc文件系统类似,作用是把系统的设备和总线按层次组织起来,使得它们可以在用户空间读取,
// 用来向用户空间导出内核的数据结构和属性
mount("sysfs", "/sys", "sysfs", 0, NULL);
mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL);
mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11));
if constexpr (WORLD_WRITABLE_KMSG) {
mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11));
}
mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8));
mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9));
// Mount staging areas for devices managed by vold
// See storage config details at http://source.android.com/devices/storage/
mount("tmpfs", "/mnt", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=1000");
// /mnt/vendor is used to mount vendor-specific partitions that can not be
// part of the vendor partition, e.g. because they are mounted read-write.
mkdir("/mnt/vendor", 0755);
// Now that tmpfs is mounted on /dev and we have /dev/kmsg, we can actually
// talk to the outside world...
InitKernelLogging(argv);
LOG(INFO) << "init first stage started!";
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
SetInitAvbVersionInRecovery();
// Enable seccomp if global boot option was passed (otherwise it is enabled in zygote).
global_seccomp();
// 加载SEINUX策略
// Set up SELinux, loading the SELinux policy.
SelinuxSetupKernelLogging();
SelinuxInitialize();
// We're in the kernel domain, so re-exec init to transition to the init domain now
// that the SELinux policy has been loaded.
if (selinux_android_restorecon("/init", 0) == -1) {
PLOG(FATAL) << "restorecon failed of /init failed";
}
setenv("INIT_SECOND_STAGE", "true", 1);
static constexpr uint32_t kNanosecondsPerMillisecond = 1e6;
uint64_t start_ms = start_time.time_since_epoch().count() / kNanosecondsPerMillisecond;
setenv("INIT_STARTED_AT", std::to_string(start_ms).c_str(), 1);
char* path = argv[0];
char* args[] = { path, nullptr };
execv(path, args);
// execv() only returns if an error happened, in which case we
// panic and never fall through this conditional.
PLOG(FATAL) << "execv(\"" << path << "\") failed";
}
// 初始化kernel日志
// At this point we're in the second stage of init.
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
// Set up a session keyring that all processes will have access to. It
// will hold things like FBE encryption keys. No process should override
// its session keyring.
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
// 系统属性系统初始化
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
export_kernel_boot_props();
// Make the time that init started available for bootstat to log.
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
// Set libavb version for Framework-only OTA match in Treble build.
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
// Set memcg property based on kernel cmdline argument
bool memcg_enabled = android::base::GetBoolProperty("ro.boot.memcg",false);
if (memcg_enabled) {
// root memory control cgroup
mkdir("/dev/memcg", 0700);
chown("/dev/memcg",AID_ROOT,AID_SYSTEM);
mount("none", "/dev/memcg", "cgroup", 0, "memory");
// app mem cgroups, used by activity manager, lmkd and zygote
mkdir("/dev/memcg/apps/",0755);
chown("/dev/memcg/apps/",AID_SYSTEM,AID_SYSTEM);
mkdir("/dev/memcg/system",0550);
chown("/dev/memcg/system",AID_SYSTEM,AID_SYSTEM);
}
// Clean up our environment.
unsetenv("INIT_SECOND_STAGE");
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
// Now set up SELinux for second stage.
SelinuxSetupKernelLogging();
SelabelInitialize();
SelinuxRestoreContext();
epoll_fd = epoll_create1(EPOLL_CLOEXEC);
if (epoll_fd == -1) {
PLOG(FATAL) << "epoll_create1 failed";
}
sigchld_handler_init();
if (!IsRebootCapable()) {
// If init does not have the CAP_SYS_BOOT capability, it is running in a container.
// In that case, receiving SIGTERM will cause the system to shut down.
InstallSigtermHandler();
}
// 加载default.prop
property_load_boot_defaults();
export_oem_lock_status();
// 启动属性服务
start_property_service();
set_usb_controller();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
subcontexts = InitializeSubcontexts();
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
// 解析init.rc文件
LoadBootScripts(am, sm);
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) DumpState();
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
am.QueueBuiltinAction(keychord_init_action, "keychord_init");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
// 最后进入无限循环
while (true) {
// By default, sleep until something happens.
int epoll_timeout_ms = -1;
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
// 执行解析出来的init.rc指令
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_restart_time = RestartProcesses();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_restart_time) {
epoll_timeout_ms = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_restart_time - boot_clock::now())
.count();
if (epoll_timeout_ms < 0) epoll_timeout_ms = 0;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout_ms = 0;
}
epoll_event ev;
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, epoll_timeout_ms));
if (nr == -1) {
PLOG(ERROR) << "epoll_wait failed";
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
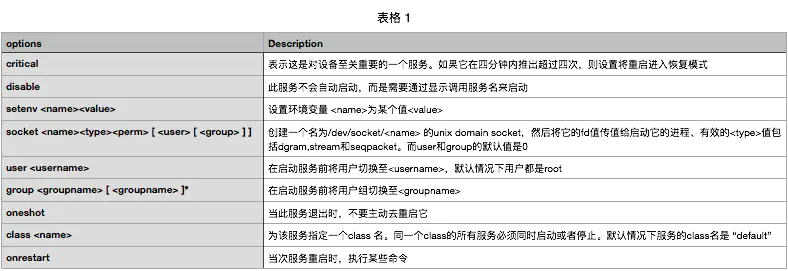
init.rc
init.rc文件是以块儿(section)为单位服务的,块儿分为两类,一类为动作(action),以关键字”on”开始, 一类为服务(service), 以关键字service为开始,无论是动作块儿还是服务块儿,并不是按照文件中的编码逐一执行的。
一个init.rc的脚本由4个类型的声明组成,即
- Action———-动作
- commands——–命令/启动
- services——–服务
- Options———选项
触发器
./system/core/rootdir/init.rc
import /init.environ.rc
import /system/etc/init/hw/init.usb.rc
import /init.${ro.hardware}.rc
import /vendor/etc/init/hw/init.${ro.hardware}.rc
import /system/etc/init/hw/init.usb.configfs.rc
import /system/etc/init/hw/init.${ro.zygote}.rc
on early-init # 在初始化早期阶段触发
start ueventd
on init # 在初始化阶段触发
start lmkd
start servicemanager
on late-init # 在初始化晚期阶段触发
# Now we can start zygote for devices with file based encryption
trigger zygote-start
on boot # 在系统启动时触发
chmod 0664 /sys/block/zram0/idle
on property:ro.debuggable=1 # 当属性值满足条件时触发
chmod 0773 /data/misc/trace
命令

服务
service <name><pathname> [ <argument> ]*
<option>
<option>
## Daemon processes to be run by init.
##
service ueventd /system/bin/ueventd
class core
critical
seclabel u:r:ueventd:s0
shutdown critical
service console /system/bin/sh
class core
console
disabled
user shell
group shell log readproc
seclabel u:r:shell:s0
setenv HOSTNAME console
-
: 表示此 service 的名称 -
: service bin 所在的路径 -
: service 启动参数
选项
init.rc文件解析
system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
LoadBootScripts(am, sm);
}
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
Parser parser = CreateParser(action_manager, service_list);
std::string bootscript = GetProperty("ro.boot.init_rc", "");
if (bootscript.empty()) {
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}
init总结
init里面做的事情总结如下:
- FirstStageMain 初始化环境变量和各种文件系统目录
- selinux相关初始化完成,然后切换SecondStageMain重启init进程
- 属性服务初始化,将各种系统属性默认值填充的到属性Map中
- 解析init.rc, 把各种action、service等解析出来填充到相应链表容器管理
- 有序将early-init、init等各种cmd加入到执行队列action_queue链表中
- 进入循环依次执行链表中的指令
zyogte
import /system/etc/init/hw/init.${ro.zygote}.rc
system/core/rootdir/init.zygote64_32.rc
qssi:/system/etc # cat ./init/hw/init.zygote64_32.rc
service zygote /system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server --socket-name=zygote
class main
priority -20
user root
group root readproc reserved_disk
socket zygote stream 660 root system
socket usap_pool_primary stream 660 root system
onrestart exec_background - system system -- /system/bin/vdc volume abort_fuse
onrestart write /sys/power/state on
onrestart restart audioserver
onrestart restart cameraserver
onrestart restart media
onrestart restart netd
onrestart restart wificond
task_profiles ProcessCapacityHigh MaxPerformance
service zygote_secondary /system/bin/app_process32 -Xzygote /system/bin --zygote --socket-name=zygote_secondary --enable-lazy-preload
class main
priority -20
user root
group root readproc reserved_disk
socket zygote_secondary stream 660 root system
socket usap_pool_secondary stream 660 root system
onrestart restart zygote
task_profiles ProcessCapacityHigh MaxPerformance
服务启动
system/core/init/init.cpp
int SecondStageMain(int argc, char** argv) {
while (true) {
if (!(prop_waiter_state.MightBeWaiting() || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
}
}
system/core/init/service.cpp
Result<void> Service::Start() {
pid_t pid = -1;
if (namespaces_.flags) {
pid = clone(nullptr, nullptr, namespaces_.flags | SIGCHLD, nullptr);
} else {
pid = fork();
}
if (pid == 0) {
umask(077);
// /system/bin/app_process64
}
}
app_process
frameworks/base/cmds/app_process/app_main.cpp
int main(int argc, char* const argv[])
{
std::string bootmode = GetProperty("ro.bootmode", "");
if ((strncmp(bootmode.c_str(), "ffbm-00", 7) == 0)
|| (strncmp(bootmode.c_str(), "ffbm-01", 7) == 0)) {
return 0;
}
if (!LOG_NDEBUG) {
String8 argv_String;
for (int i = 0; i < argc; ++i) {
argv_String.append("\"");
argv_String.append(argv[i]);
argv_String.append("\" ");
}
ALOGV("app_process main with argv: %s", argv_String.string());
}
// 创建AppRuntime对象,AppRuntime类继承自AndroidRuntime
AppRuntime runtime(argv[0], computeArgBlockSize(argc, argv));
// Process command line arguments
// ignore argv[0]
argc--;
argv++;
// Everything up to '--' or first non '-' arg goes to the vm.
//
// The first argument after the VM args is the "parent dir", which
// is currently unused.
//
// After the parent dir, we expect one or more the following internal
// arguments :
//
// --zygote : Start in zygote mode
// --start-system-server : Start the system server.
// --application : Start in application (stand alone, non zygote) mode.
// --nice-name : The nice name for this process.
//
// For non zygote starts, these arguments will be followed by
// the main class name. All remaining arguments are passed to
// the main method of this class.
//
// For zygote starts, all remaining arguments are passed to the zygote.
// main function.
//
// Note that we must copy argument string values since we will rewrite the
// entire argument block when we apply the nice name to argv0.
//
// As an exception to the above rule, anything in "spaced commands"
// goes to the vm even though it has a space in it.
const char* spaced_commands[] = { "-cp", "-classpath" };
// Allow "spaced commands" to be succeeded by exactly 1 argument (regardless of -s).
bool known_command = false;
int i;
for (i = 0; i < argc; i++) {
if (known_command == true) {
runtime.addOption(strdup(argv[i]));
// The static analyzer gets upset that we don't ever free the above
// string. Since the allocation is from main, leaking it doesn't seem
// problematic. NOLINTNEXTLINE
ALOGV("app_process main add known option '%s'", argv[i]);
known_command = false;
continue;
}
for (int j = 0;
j < static_cast<int>(sizeof(spaced_commands) / sizeof(spaced_commands[0]));
++j) {
if (strcmp(argv[i], spaced_commands[j]) == 0) {
known_command = true;
ALOGV("app_process main found known command '%s'", argv[i]);
}
}
if (argv[i][0] != '-') {
break;
}
if (argv[i][1] == '-' && argv[i][2] == 0) {
++i; // Skip --.
break;
}
runtime.addOption(strdup(argv[i]));
// The static analyzer gets upset that we don't ever free the above
// string. Since the allocation is from main, leaking it doesn't seem
// problematic. NOLINTNEXTLINE
ALOGV("app_process main add option '%s'", argv[i]);
}
// Parse runtime arguments. Stop at first unrecognized option.
bool zygote = false;
bool startSystemServer = false;
bool application = false;
String8 niceName;
String8 className;
++i; // Skip unused "parent dir" argument.
while (i < argc) {
const char* arg = argv[i++];
if (strcmp(arg, "--zygote") == 0) {
zygote = true;
niceName = ZYGOTE_NICE_NAME;
} else if (strcmp(arg, "--start-system-server") == 0) {
startSystemServer = true;
} else if (strcmp(arg, "--application") == 0) {
application = true;
} else if (strncmp(arg, "--nice-name=", 12) == 0) {
niceName.setTo(arg + 12);
} else if (strncmp(arg, "--", 2) != 0) {
className.setTo(arg);
break;
} else {
--i;
break;
}
}
Vector<String8> args;
if (!className.isEmpty()) {
// We're not in zygote mode, the only argument we need to pass
// to RuntimeInit is the application argument.
//
// The Remainder of args get passed to startup class main(). Make
// copies of them before we overwrite them with the process name.
args.add(application ? String8("application") : String8("tool"));
runtime.setClassNameAndArgs(className, argc - i, argv + i);
if (!LOG_NDEBUG) {
String8 restOfArgs;
char* const* argv_new = argv + i;
int argc_new = argc - i;
for (int k = 0; k < argc_new; ++k) {
restOfArgs.append("\"");
restOfArgs.append(argv_new[k]);
restOfArgs.append("\" ");
}
ALOGV("Class name = %s, args = %s", className.string(), restOfArgs.string());
}
} else {
// We're in zygote mode.
maybeCreateDalvikCache();
if (startSystemServer) {
args.add(String8("start-system-server"));
}
char prop[PROP_VALUE_MAX];
if (property_get(ABI_LIST_PROPERTY, prop, NULL) == 0) {
LOG_ALWAYS_FATAL("app_process: Unable to determine ABI list from property %s.",
ABI_LIST_PROPERTY);
return 11;
}
String8 abiFlag("--abi-list=");
abiFlag.append(prop);
args.add(abiFlag);
// In zygote mode, pass all remaining arguments to the zygote
// main() method.
for (; i < argc; ++i) {
args.add(String8(argv[i]));
}
}
if (!niceName.isEmpty()) {
runtime.setArgv0(niceName.string(), true /* setProcName */);
}
if (zygote) {
runtime.start("com.android.internal.os.ZygoteInit", args, zygote);
} else if (className) {
runtime.start("com.android.internal.os.RuntimeInit", args, zygote);
} else {
fprintf(stderr, "Error: no class name or --zygote supplied.\n");
app_usage();
LOG_ALWAYS_FATAL("app_process: no class name or --zygote supplied.");
}
}
AppRuntime
frameworks/base/cmds/app_process/app_main.cpp
class AppRuntime : public AndroidRuntime
{
public:
AppRuntime(char* argBlockStart, const size_t argBlockLength)
: AndroidRuntime(argBlockStart, argBlockLength)
, mClass(NULL)
{
}
void setClassNameAndArgs(const String8& className, int argc, char * const *argv) {
mClassName = className;
for (int i = 0; i < argc; ++i) {
mArgs.add(String8(argv[i]));
}
}
virtual void onVmCreated(JNIEnv* env)
{
if (mClassName.isEmpty()) {
return; // Zygote. Nothing to do here.
}
/*
* This is a little awkward because the JNI FindClass call uses the
* class loader associated with the native method we're executing in.
* If called in onStarted (from RuntimeInit.finishInit because we're
* launching "am", for example), FindClass would see that we're calling
* from a boot class' native method, and so wouldn't look for the class
* we're trying to look up in CLASSPATH. Unfortunately it needs to,
* because the "am" classes are not boot classes.
*
* The easiest fix is to call FindClass here, early on before we start
* executing boot class Java code and thereby deny ourselves access to
* non-boot classes.
*/
char* slashClassName = toSlashClassName(mClassName.string());
mClass = env->FindClass(slashClassName);
if (mClass == NULL) {
ALOGE("ERROR: could not find class '%s'\n", mClassName.string());
}
free(slashClassName);
mClass = reinterpret_cast<jclass>(env->NewGlobalRef(mClass));
}
virtual void onStarted()
{
sp<ProcessState> proc = ProcessState::self();
ALOGV("App process: starting thread pool.\n");
proc->startThreadPool();
AndroidRuntime* ar = AndroidRuntime::getRuntime();
ar->callMain(mClassName, mClass, mArgs);
IPCThreadState::self()->stopProcess();
hardware::IPCThreadState::self()->stopProcess();
}
virtual void onZygoteInit()
{
sp<ProcessState> proc = ProcessState::self();
ALOGV("App process: starting thread pool.\n");
proc->startThreadPool();
}
virtual void onExit(int code)
{
if (mClassName.isEmpty()) {
// if zygote
IPCThreadState::self()->stopProcess();
hardware::IPCThreadState::self()->stopProcess();
}
AndroidRuntime::onExit(code);
}
String8 mClassName;
Vector<String8> mArgs;
jclass mClass;
};
frameworks/base/core/jni/AndroidRuntime.cpp
void AndroidRuntime::start(const char* className, const Vector<String8>& options, bool zygote)
{
ALOGD(">>>>>> START %s uid %d <<<<<<\n",
className != NULL ? className : "(unknown)", getuid());
static const String8 startSystemServer("start-system-server");
// Whether this is the primary zygote, meaning the zygote which will fork system server.
bool primary_zygote = false;
/*
* 打印日志
* 'startSystemServer == true' means runtime is obsolete and not run from
* init.rc anymore, so we print out the boot start event here.
*/
for (size_t i = 0; i < options.size(); ++i) {
if (options[i] == startSystemServer) {
primary_zygote = true;
/* track our progress through the boot sequence */
const int LOG_BOOT_PROGRESS_START = 3000;
LOG_EVENT_LONG(LOG_BOOT_PROGRESS_START, ns2ms(systemTime(SYSTEM_TIME_MONOTONIC)));
}
}
const char* rootDir = getenv("ANDROID_ROOT");
if (rootDir == NULL) {
rootDir = "/system";
if (!hasDir("/system")) {
LOG_FATAL("No root directory specified, and /system does not exist.");
return;
}
setenv("ANDROID_ROOT", rootDir, 1);
}
-----------------------------------------------------------------------
// 启动虚拟机
//const char* kernelHack = getenv("LD_ASSUME_KERNEL");
//ALOGD("Found LD_ASSUME_KERNEL='%s'\n", kernelHack);
/* start the virtual machine */
JniInvocation jni_invocation;
jni_invocation.Init(NULL);
JNIEnv* env;
if (startVm(&mJavaVM, &env, zygote, primary_zygote) != 0) {
return;
}
onVmCreated(env);
/*
* 注册系统的JNI函数
* Register android functions.
*/
if (startReg(env) < 0) {
ALOGE("Unable to register all android natives\n");
return;
}
/*
* We want to call main() with a String array with arguments in it.
* At present we have two arguments, the class name and an option string.
* Create an array to hold them.
*/
jclass stringClass;
jobjectArray strArray;
jstring classNameStr;
stringClass = env->FindClass("java/lang/String");
assert(stringClass != NULL);
strArray = env->NewObjectArray(options.size() + 1, stringClass, NULL);
assert(strArray != NULL);
classNameStr = env->NewStringUTF(className);
assert(classNameStr != NULL);
env->SetObjectArrayElement(strArray, 0, classNameStr);
for (size_t i = 0; i < options.size(); ++i) {
jstring optionsStr = env->NewStringUTF(options.itemAt(i).string());
assert(optionsStr != NULL);
env->SetObjectArrayElement(strArray, i + 1, optionsStr);
}
/*
* Start VM. This thread becomes the main thread of the VM, and will
* not return until the VM exits.
*/
char* slashClassName = toSlashClassName(className != NULL ? className : "");
jclass startClass = env->FindClass(slashClassName);
if (startClass == NULL) {
ALOGE("JavaVM unable to locate class '%s'\n", slashClassName);
/* keep going */
} else {
jmethodID startMeth = env->GetStaticMethodID(startClass, "main",
"([Ljava/lang/String;)V");
if (startMeth == NULL) {
ALOGE("JavaVM unable to find main() in '%s'\n", className);
/* keep going */
} else {
// 调用JAVA层的ZygoteInit的main函数
env->CallStaticVoidMethod(startClass, startMeth, strArray);
#if 0
if (env->ExceptionCheck())
threadExitUncaughtException(env);
#endif
}
}
free(slashClassName);
ALOGD("Shutting down VM\n");
if (mJavaVM->DetachCurrentThread() != JNI_OK)
ALOGW("Warning: unable to detach main thread\n");
if (mJavaVM->DestroyJavaVM() != 0)
ALOGW("Warning: VM did not shut down cleanly\n");
}
ZygoteInit
framework/base/core/java/com/android/internal/os/ZygoteInit.java
public class ZygoteInit {
public static void main(String argv[]) {
ZygoteServer zygoteServer = null;
// Mark zygote start. This ensures that thread creation will throw
// an error.
ZygoteHooks.startZygoteNoThreadCreation();
// Zygote goes into its own process group.
try {
Os.setpgid(0, 0);
} catch (ErrnoException ex) {
throw new RuntimeException("Failed to setpgid(0,0)", ex);
}
Runnable caller;
try {
// Store now for StatsLogging later.
final long startTime = SystemClock.elapsedRealtime();
final boolean isRuntimeRestarted = "1".equals(
SystemProperties.get("sys.boot_completed"));
String bootTimeTag = Process.is64Bit() ? "Zygote64Timing" : "Zygote32Timing";
TimingsTraceLog bootTimingsTraceLog = new TimingsTraceLog(bootTimeTag,
Trace.TRACE_TAG_DALVIK);
bootTimingsTraceLog.traceBegin("ZygoteInit");
RuntimeInit.preForkInit();
boolean startSystemServer = false;
String zygoteSocketName = "zygote";
String abiList = null;
boolean enableLazyPreload = false;
for (int i = 1; i < argv.length; i++) {
if ("start-system-server".equals(argv[i])) {
startSystemServer = true;
} else if ("--enable-lazy-preload".equals(argv[i])) {
enableLazyPreload = true;
} else if (argv[i].startsWith(ABI_LIST_ARG)) {
abiList = argv[i].substring(ABI_LIST_ARG.length());
} else if (argv[i].startsWith(SOCKET_NAME_ARG)) {
zygoteSocketName = argv[i].substring(SOCKET_NAME_ARG.length());
} else {
throw new RuntimeException("Unknown command line argument: " + argv[i]);
}
}
final boolean isPrimaryZygote = zygoteSocketName.equals(Zygote.PRIMARY_SOCKET_NAME);
if (!isRuntimeRestarted) {
if (isPrimaryZygote) {
FrameworkStatsLog.write(FrameworkStatsLog.BOOT_TIME_EVENT_ELAPSED_TIME_REPORTED,
BOOT_TIME_EVENT_ELAPSED_TIME__EVENT__ZYGOTE_INIT_START,
startTime);
} else if (zygoteSocketName.equals(Zygote.SECONDARY_SOCKET_NAME)) {
FrameworkStatsLog.write(FrameworkStatsLog.BOOT_TIME_EVENT_ELAPSED_TIME_REPORTED,
BOOT_TIME_EVENT_ELAPSED_TIME__EVENT__SECONDARY_ZYGOTE_INIT_START,
startTime);
}
}
if (abiList == null) {
throw new RuntimeException("No ABI list supplied.");
}
// In some configurations, we avoid preloading resources and classes eagerly.
// In such cases, we will preload things prior to our first fork.
if (!enableLazyPreload) {
bootTimingsTraceLog.traceBegin("ZygotePreload");
EventLog.writeEvent(LOG_BOOT_PROGRESS_PRELOAD_START,
SystemClock.uptimeMillis());
preload(bootTimingsTraceLog);
EventLog.writeEvent(LOG_BOOT_PROGRESS_PRELOAD_END,
SystemClock.uptimeMillis());
bootTimingsTraceLog.traceEnd(); // ZygotePreload
}
// Do an initial gc to clean up after startup
bootTimingsTraceLog.traceBegin("PostZygoteInitGC");
gcAndFinalize();
bootTimingsTraceLog.traceEnd(); // PostZygoteInitGC
bootTimingsTraceLog.traceEnd(); // ZygoteInit
Zygote.initNativeState(isPrimaryZygote);
ZygoteHooks.stopZygoteNoThreadCreation();
zygoteServer = new ZygoteServer(isPrimaryZygote);
if (startSystemServer) {
Runnable r = forkSystemServer(abiList, zygoteSocketName, zygoteServer);
// {@code r == null} in the parent (zygote) process, and {@code r != null} in the
// child (system_server) process.
if (r != null) {
r.run();
return;
}
}
Log.i(TAG, "Accepting command socket connections");
// The select loop returns early in the child process after a fork and
// loops forever in the zygote.
caller = zygoteServer.runSelectLoop(abiList);
} catch (Throwable ex) {
Log.e(TAG, "System zygote died with exception", ex);
throw ex;
} finally {
if (zygoteServer != null) {
zygoteServer.closeServerSocket();
}
}
// We're in the child process and have exited the select loop. Proceed to execute the
// command.
if (caller != null) {
caller.run();
}
}
}
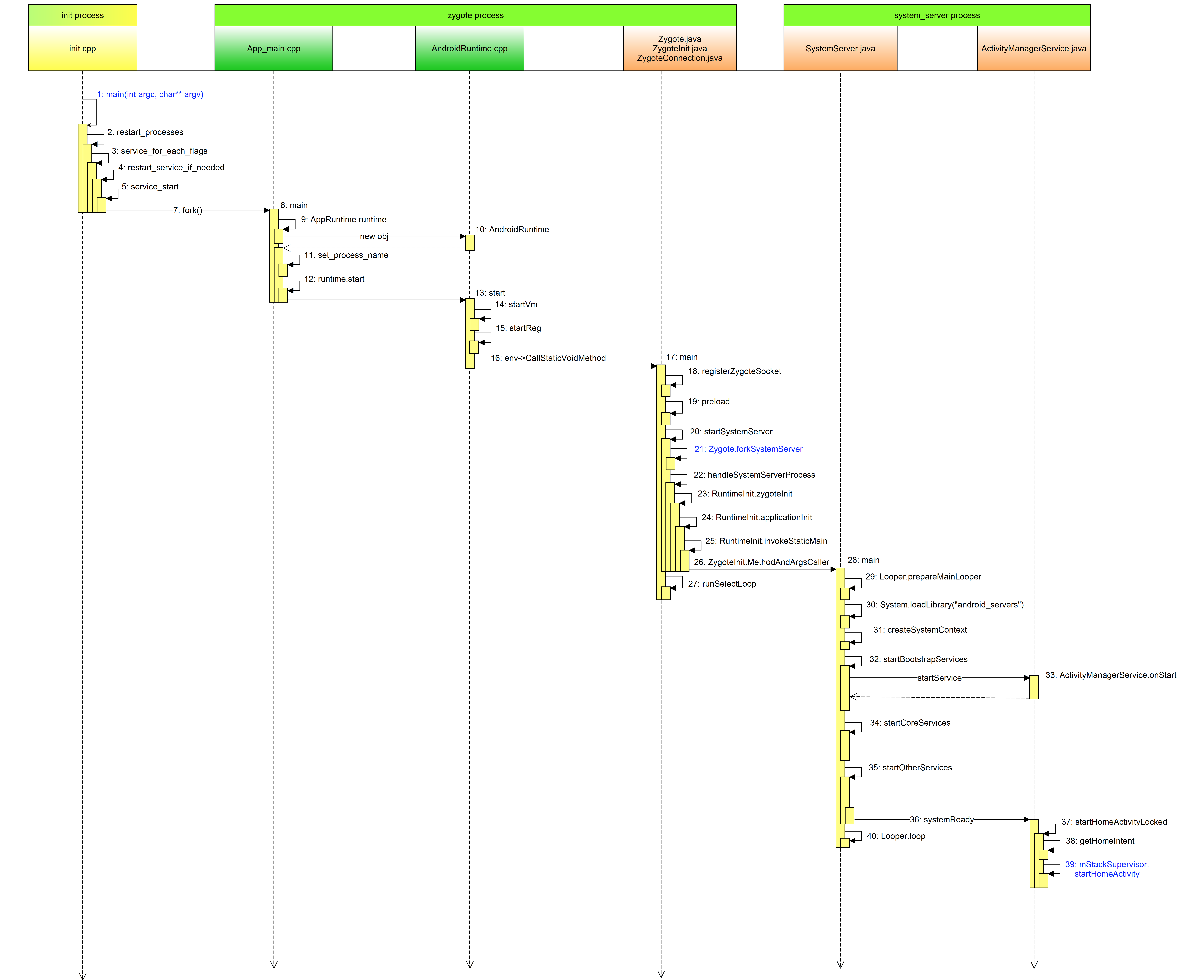
Zygote UML
开机日志
01-10 14:26:20.493 0 0 I init : init first stage started!
01-10 14:26:23.786 0 0 I init : Loading SELinux policy
01-10 14:26:25.196 0 0 I init : init second stage started!
01-10 14:26:26.057 0 0 I ueventd : ueventd started!
01-10 14:26:26.067 0 0 I selinux : SELinux: Loaded file_contexts
01-10 14:26:26.075 0 0 I ueventd : Parsing file /system/etc/ueventd.rc...
01-10 14:26:26.083 0 0 I ueventd : Parsing file /vendor/ueventd.rc...
01-10 14:26:28.985 510 510 I hwservicemanager: hwservicemanager is ready now.
01-10 14:26:30.226 0 0 I init : processing action (init) from (/vendor/etc/init/qseecomd.rc:5)
01-10 14:26:30.288 0 0 I init : processing action (late-init) from (/system/etc/init/hw/init.rc:438)
01-10 14:26:30.347 0 0 I init : processing action (queue_property_triggers) from (<Builtin Action>:0)
12-31 17:50:00.358 612 612 D AndroidRuntime: >>>>>> START com.android.internal.os.ZygoteInit uid 0 <<<<<<
12-31 17:50:06.408 0 0 I init : starting service 'media'...
总结