Android Bootloader-Main system-Recovery
Android 启动模式
- Normal 正常启动
- Safe mode 安全模式
- Bootloader 模式
- Recovery mode 恢复模式
- Diagnostic mode 诊断模式
- Fastboot mode
每个android设备不是所有模式都有,跟具体厂商有关
OTA Install
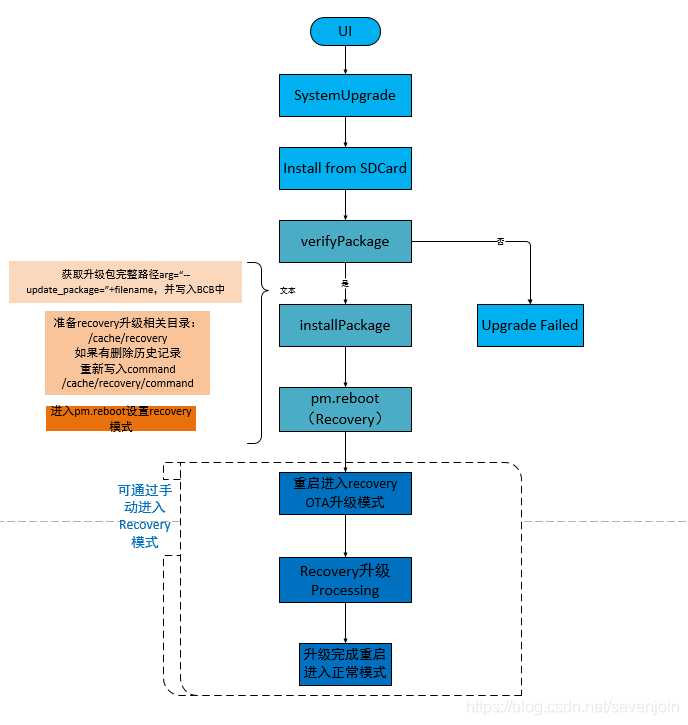
RecoverySystem
/**
* Reboots the device in order to install the given update
* package.
* Requires the {@link android.Manifest.permission#REBOOT} permission.
*
* @param context the Context to use
* @param packageFile the update package to install. Must be on
* a partition mountable by recovery. (The set of partitions
* known to recovery may vary from device to device. Generally,
* /cache and /data are safe.)
*
* @throws IOException if writing the recovery command file
* fails, or if the reboot itself fails.
*/
public static void installPackage(Context context, File packageFile)
throws IOException {
String filename = packageFile.getCanonicalPath();
Log.w(TAG, "!!! REBOOTING TO INSTALL " + filename + " !!!");
String arg = "--update_package=" + filename +
"\n--locale=" + Locale.getDefault().toString();
bootCommand(context, arg);
}
/**
* Reboot into the recovery system with the supplied argument.
* @param arg to pass to the recovery utility.
* @throws IOException if something goes wrong.
*/
private static void bootCommand(Context context, String arg) throws IOException {
RECOVERY_DIR.mkdirs(); // In case we need it
COMMAND_FILE.delete(); // In case it's not writable
LOG_FILE.delete();
FileWriter command = new FileWriter(COMMAND_FILE);
try {
command.write(arg);
command.write("\n");
} finally {
command.close();
}
// Having written the command file, go ahead and reboot
PowerManager pm = (PowerManager) context.getSystemService(Context.POWER_SERVICE);
pm.reboot("recovery");
throw new IOException("Reboot failed (no permissions?)");
}
PowerManagerService
/**
* Reboots the device.
*
* @param confirm If true, shows a reboot confirmation dialog.
* @param reason The reason for the reboot, or null if none.
* @param wait If true, this call waits for the reboot to complete and does not return.
*/
@Override // Binder call
public void reboot(boolean confirm, String reason, boolean wait) {
mContext.enforceCallingOrSelfPermission(android.Manifest.permission.REBOOT, null);
final long ident = Binder.clearCallingIdentity();
try {
shutdownOrRebootInternal(false, confirm, reason, wait);
} finally {
Binder.restoreCallingIdentity(ident);
}
}
private void shutdownOrRebootInternal(final boolean shutdown, final boolean confirm,
final String reason, boolean wait) {
if (mHandler == null || !mSystemReady) {
throw new IllegalStateException("Too early to call shutdown() or reboot()");
}
Runnable runnable = new Runnable() {
@Override
public void run() {
synchronized (this) {
if (shutdown) {
ShutdownThread.shutdown(mContext, confirm);
} else {
ShutdownThread.reboot(mContext, reason, confirm);
}
}
}
};
// ShutdownThread must run on a looper capable of displaying the UI.
Message msg = Message.obtain(mHandler, runnable);
msg.setAsynchronous(true);
mHandler.sendMessage(msg);
// PowerManager.reboot() is documented not to return so just wait for the inevitable.
if (wait) {
synchronized (runnable) {
while (true) {
try {
runnable.wait();
} catch (InterruptedException e) {
}
}
}
}
}
/**
* Low-level function to reboot the device. On success, this function
* doesn't return. If more than 5 seconds passes from the time,
* a reboot is requested, this method returns.
*
* @param reason code to pass to the kernel (e.g. "recovery"), or null.
*/
public static void lowLevelReboot(String reason) {
if (reason == null) {
reason = "";
}
SystemProperties.set("sys.powerctl", "reboot," + reason);
try {
Thread.sleep(20000);
} catch (InterruptedException e) {
Thread.currentThread().interrupt();
}
}
ShutdownThread
// Provides shutdown assurance in case the system_server is killed
public static final String SHUTDOWN_ACTION_PROPERTY = "sys.shutdown.requested";
/**
* Request a clean shutdown, waiting for subsystems to clean up their
* state etc. Must be called from a Looper thread in which its UI
* is shown.
*
* @param context Context used to display the shutdown progress dialog.
* @param reason code to pass to the kernel (e.g. "recovery"), or null.
* @param confirm true if user confirmation is needed before shutting down.
*/
public static void reboot(final Context context, String reason, boolean confirm) {
mReboot = true;
mRebootSafeMode = false;
mRebootReason = reason;
if (reason != null) {
Log.d(TAG,"reboot reason is " + mRebootReason);
}
shutdownInner(context, confirm);
}
static void shutdownInner(final Context context, boolean confirm) {
// ensure that only one thread is trying to power down.
// any additional calls are just returned
synchronized (sIsStartedGuard) {
if (sIsStarted) {
Log.d(TAG, "Request to shutdown already running, returning.");
return;
}
}
if (confirm) {
-----------------------------------------------
} else {
beginShutdownSequence(context);
}
}
private static void beginShutdownSequence(Context context) {
synchronized (sIsStartedGuard) {
if (sIsStarted) {
Log.d(TAG, "Shutdown sequence already running, returning.");
return;
}
sIsStarted = true;
}
SystemProperties.set("sys.start_shutdown", "1");
SystemProperties.set("sys.fasboot_shutdown", "1");
-------------------------------------------------------------------
if (mRebootReason != null){
mBootFastEnable = false;
Log.d(TAG,"have reason " + mRebootReason + " real reboot");
}
-------------------------------------------------------------------
sInstance = new ShutdownThread();
------------------------------------------------------------------
sInstance.start();
}
/**
* Makes sure we handle the shutdown gracefully.
* Shuts off power regardless of radio and bluetooth state if the alloted time has passed.
*/
public void run() {
-----------------------------------------------------
if (!mBootFastEnable) {
------------------------------------------------
/*
* Write a system property in case the system_server reboots before we
* get to the actual hardware restart. If that happens, we'll retry at
* the beginning of the SystemServer startup.
*/
{
String reason = (mReboot ? "1" : "0") + (mRebootReason != null ? mRebootReason : "");
SystemProperties.set(SHUTDOWN_ACTION_PROPERTY, reason);
}
----------------------------------------------------
killRemoveActivity(mContext);
killRemoveService(mContext);
Log.i(TAG, "Sending shutdown broadcast...");
// First send the high-level shut down broadcast.
mActionDone = false;
Intent intent = new Intent(Intent.ACTION_SHUTDOWN);
intent.addFlags(Intent.FLAG_RECEIVER_FOREGROUND);
mContext.sendOrderedBroadcastAsUser(intent,
UserHandle.ALL, null, br, mHandler, 0, null, null);
----------------------------------------------------------------
Log.i(TAG, "Shutting down activity manager...");
final IActivityManager am =
ActivityManagerNative.asInterface(ServiceManager.checkService("activity"));
if (am != null) {
try {
am.shutdown(MAX_BROADCAST_TIME);
} catch (RemoteException e) {
}
}
-----------------------------------------------------------------
// Shutdown MountService to ensure media is in a safe state
IMountShutdownObserver observer = new IMountShutdownObserver.Stub() {
public void onShutDownComplete(int statusCode) throws RemoteException {
Log.w(TAG, "Result code " + statusCode + " from MountService.shutdown");
actionDone();
}
};
Log.i(TAG, "Shutting down MountService");
-----------------------------------------------------------------
rebootOrShutdown(mReboot, mRebootReason);
} else {
-----------------------------------------------------
}
}
/**
* Do not call this directly. Use {@link #reboot(Context, String, boolean)}
* or {@link #shutdown(Context, boolean)} instead.
*
* @param reboot true to reboot or false to shutdown
* @param reason reason for reboot
*/
public static void rebootOrShutdown(boolean reboot, String reason) {
if (reboot) {
Log.i(TAG, "Rebooting, reason: " + reason);
try {
PowerManagerService.lowLevelReboot(reason);
} catch (Exception e) {
Log.e(TAG, "Reboot failed, will attempt shutdown instead", e);
}
} else {
------------------------------------------------------------
}
---------------------------------------------------------------
}
init.rc
on property:sys.powerctl=*
powerctl ${sys.powerctl}
keywords.h
system/core/init/keywords.h
int do_powerctl(int nargs, char **args);
KEYWORD(powerctl, COMMAND, 1, do_powerctl)
builtins.c
system/core/init/builtins.c
int do_powerctl(int nargs, char **args)
{
char command[PROP_VALUE_MAX];
int res;
int len = 0;
int cmd = 0;
char *reboot_target;
res = expand_props(command, args[1], sizeof(command));
if (res) {
ERROR("powerctl: cannot expand '%s'\n", args[1]);
return -EINVAL;
}
if (strncmp(command, "shutdown", 8) == 0) {
cmd = ANDROID_RB_POWEROFF;
len = 8;
} else if (strncmp(command, "reboot", 6) == 0) {
cmd = ANDROID_RB_RESTART2;
len = 6;
} else {
ERROR("powerctl: unrecognized command '%s'\n", command);
return -EINVAL;
}
if (command[len] == ',') {
reboot_target = &command[len + 1];
} else if (command[len] == '\0') {
reboot_target = "";
} else {
ERROR("powerctl: unrecognized reboot target '%s'\n", &command[len]);
return -EINVAL;
}
return android_reboot(cmd, 0, reboot_target);
}
android_reboot.c
system/core/libcutils/android_reboot.c
int android_reboot(int cmd, int flags, char *arg)
{
int ret;
sync();
remount_ro();
switch (cmd) {
case ANDROID_RB_RESTART:
ret = reboot(RB_AUTOBOOT);
break;
case ANDROID_RB_POWEROFF:
ret = reboot(RB_POWER_OFF);
break;
case ANDROID_RB_RESTART2:
//ret = __reboot(LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2,
// LINUX_REBOOT_CMD_RESTART2, arg);
write_misc(arg);
ret = reboot(RB_AUTOBOOT);
break;
default:
ret = -1;
}
return ret;
}
misc_rw.c
system/core/libcutils/misc_rw.c
static const char *MISC_DEVICE = "/dev/block/by-name/misc";
/* force the next boot to recovery/efex */
int write_misc(char *reason){
struct bootloader_message boot, temp;
char device[32] = {0};
memset(&boot, 0, sizeof(boot));
if(!strcmp("recovery",reason)){
reason = "boot-recovery";
}
strcpy(boot.command, reason);
sprintf(device,"%s", MISC_DEVICE);
if (set_bootloader_message_block(&boot, device))
return -1;
//read for compare
memset(&temp, 0, sizeof(temp));
if (get_bootloader_message_block(&temp, device))
return -1;
if ( memcmp(&boot, &temp, sizeof(boot)))
return -1;
return 0;
}
reboot.c
./bionic/libc/bionic/reboot.c
int reboot (int mode)
{
return __reboot( LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2, mode, NULL );
}
__reboot.S
bionic/libc/arch-arm/syscalls/__reboot.S
ENTRY(__reboot)
mov ip, r7
ldr r7, =__NR_reboot // 系统调用号 88
swi #0
mov r7, ip
cmn r0, #(MAX_ERRNO + 1)
bxls lr
neg r0, r0
b __set_errno
END(__reboot)
unistd_32.h
./bionic/libc/kernel/arch-x86/asm/unistd_32.h
#define __NR_reboot 88
sys.c
kernel/kernel/sys.c
/*
* Reboot system call: for obvious reasons only root may call it,
* and even root needs to set up some magic numbers in the registers
* so that some mistake won't make this reboot the whole machine.
* You can also set the meaning of the ctrl-alt-del-key here.
*
* reboot doesn't sync: do that yourself before calling this.
*/
SYSCALL_DEFINE4(reboot, int, magic1, int, magic2, unsigned int, cmd,
void __user *, arg)
{
char buffer[256];
int ret = 0;
/* We only trust the superuser with rebooting the system. */
if (!capable(CAP_SYS_BOOT))
return -EPERM;
/* For safety, we require "magic" arguments. */
if (magic1 != LINUX_REBOOT_MAGIC1 ||
(magic2 != LINUX_REBOOT_MAGIC2 &&
magic2 != LINUX_REBOOT_MAGIC2A &&
magic2 != LINUX_REBOOT_MAGIC2B &&
magic2 != LINUX_REBOOT_MAGIC2C))
return -EINVAL;
/*
* If pid namespaces are enabled and the current task is in a child
* pid_namespace, the command is handled by reboot_pid_ns() which will
* call do_exit().
*/
ret = reboot_pid_ns(task_active_pid_ns(current), cmd);
if (ret)
return ret;
/* Instead of trying to make the power_off code look like
* halt when pm_power_off is not set do it the easy way.
*/
if ((cmd == LINUX_REBOOT_CMD_POWER_OFF) && !pm_power_off)
cmd = LINUX_REBOOT_CMD_HALT;
mutex_lock(&reboot_mutex);
switch (cmd) {
case LINUX_REBOOT_CMD_RESTART:
kernel_restart(NULL);
break;
case LINUX_REBOOT_CMD_CAD_ON:
C_A_D = 1;
break;
case LINUX_REBOOT_CMD_CAD_OFF:
C_A_D = 0;
break;
case LINUX_REBOOT_CMD_HALT:
kernel_halt();
do_exit(0);
panic("cannot halt");
case LINUX_REBOOT_CMD_POWER_OFF:
kernel_power_off();
do_exit(0);
break;
case LINUX_REBOOT_CMD_RESTART2:
if (strncpy_from_user(&buffer[0], arg, sizeof(buffer) - 1) < 0) {
ret = -EFAULT;
break;
}
buffer[sizeof(buffer) - 1] = '\0';
kernel_restart(buffer);
break;
#ifdef CONFIG_KEXEC
case LINUX_REBOOT_CMD_KEXEC:
ret = kernel_kexec();
break;
#endif
#ifdef CONFIG_HIBERNATION
case LINUX_REBOOT_CMD_SW_SUSPEND:
ret = hibernate();
break;
#endif
default:
ret = -EINVAL;
break;
}
mutex_unlock(&reboot_mutex);
return ret;
}
/**
* kernel_restart - reboot the system
* @cmd: pointer to buffer containing command to execute for restart
* or %NULL
*
* Shutdown everything and perform a clean reboot.
* This is not safe to call in interrupt context.
*/
void kernel_restart(char *cmd)
{
kernel_restart_prepare(cmd);
disable_nonboot_cpus();
if (!cmd)
printk(KERN_EMERG "Restarting system.\n");
else
printk(KERN_EMERG "Restarting system with command '%s'.\n", cmd);
kmsg_dump(KMSG_DUMP_RESTART);
machine_restart(cmd);
}
static void kernel_shutdown_prepare(enum system_states state)
{
blocking_notifier_call_chain(&reboot_notifier_list,
(state == SYSTEM_HALT)?SYS_HALT:SYS_POWER_OFF, NULL);
system_state = state;
usermodehelper_disable();
device_shutdown();
}
process.c
./arch/arm/kernel/process.c
void machine_restart(char *cmd)
{
machine_shutdown();
/* Flush the console to make sure all the relevant messages make it
* out to the console drivers */
arm_machine_flush_console();
arm_pm_restart(reboot_mode, cmd);
/* Give a grace period for failure to restart of 1s */
mdelay(1000);
/* Whoops - the platform was unable to reboot. Tell the user! */
printk("Reboot failed -- System halted\n");
local_irq_disable();
while (1);
}
Recovery Mode
源码
bootable/recovery/
LOCAL_SRC_FILES := \
insmodctp.cpp \
recovery.cpp \
bootloader.cpp \
install.cpp \
roots.cpp \
ui.cpp \
screen_ui.cpp \
verifier.cpp \
adb_install.cpp
编译结果
out/target/product/***/recovery/root system/bin/recovery
.
├── charger
├── data
├── default.prop
├── dev
├── disp.ko
├── etc
│ └── recovery.fstab
├── file_contexts
├── fstab.sun8i
├── init
├── initlogo.rle
├── init.rc
├── init.recovery.sun8i.rc
├── lcd.ko
├── nand.ko
├── proc
├── property_contexts
├── res
│ ├── images
│ └── keys
├── sbin
│ ├── adbd
│ ├── healthd
│ ├── recovery
│ ├── ueventd -> ../init
│ └── watchdogd -> ../init
├── seapp_contexts
├── sepolicy
├── sunxi-keyboard.ko
├── sw-device.ko
├── sys
├── system
├── tmp
├── ueventd.rc
└── ueventd.sun8i.rc
分区(A33)
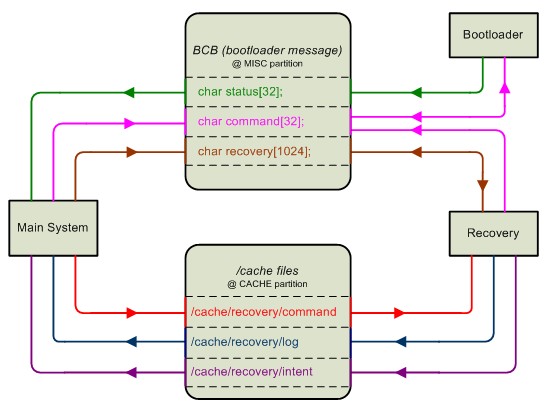
Recovery的工作需要整个软件平台的配合,从架构角度看,有三个部分:
- Main system: 用boot.img启动的Linux系统,Android的正常工作模式。
- Recovery: 用recovery.img启动的Linux系统,主要是运行Recovery程序。
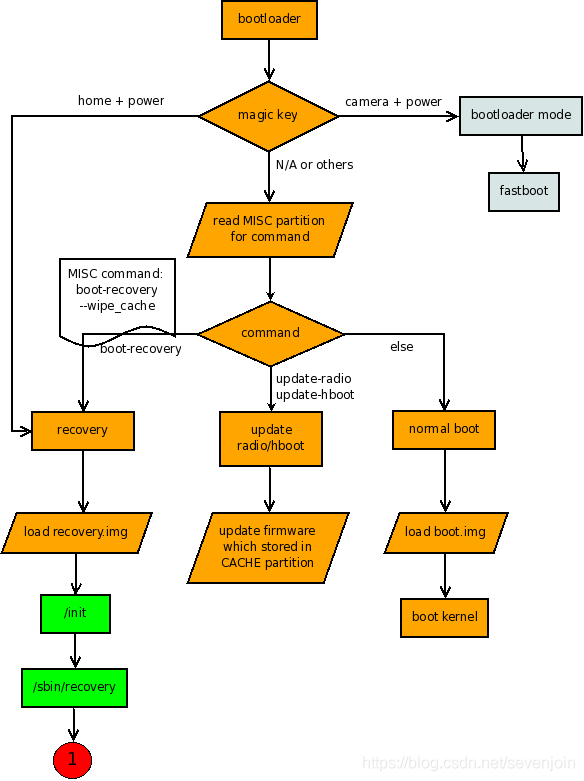
- Bootloader: 除了加载、启动系统,还会通过读取flash的MISC分区获得来自Main system和Recovery的消息,并以此决定做何种操作。
# ls -al dev/block/by-name/
lrwxrwxrwx root root 2021-01-01 08:00 UDISK -> /dev/block/mmcblk0p1
lrwxrwxrwx root root 2021-01-01 08:00 boot -> /dev/block/mmcblk0p6
lrwxrwxrwx root root 2021-01-01 08:00 bootloader -> /dev/block/mmcblk0p2
lrwxrwxrwx root root 2021-01-01 08:00 cache -> /dev/block/mmcblk0p10
lrwxrwxrwx root root 2021-01-01 08:00 env -> /dev/block/mmcblk0p5
lrwxrwxrwx root root 2021-01-01 08:00 metadata -> /dev/block/mmcblk0p11
lrwxrwxrwx root root 2021-01-01 08:00 misc -> /dev/block/mmcblk0p8
lrwxrwxrwx root root 2021-01-01 08:00 private -> /dev/block/mmcblk0p12
lrwxrwxrwx root root 2021-01-01 08:00 recovery -> /dev/block/mmcblk0p9
lrwxrwxrwx root root 2021-01-01 08:00 system -> /dev/block/mmcblk0p7
Bootloader进入Recovery
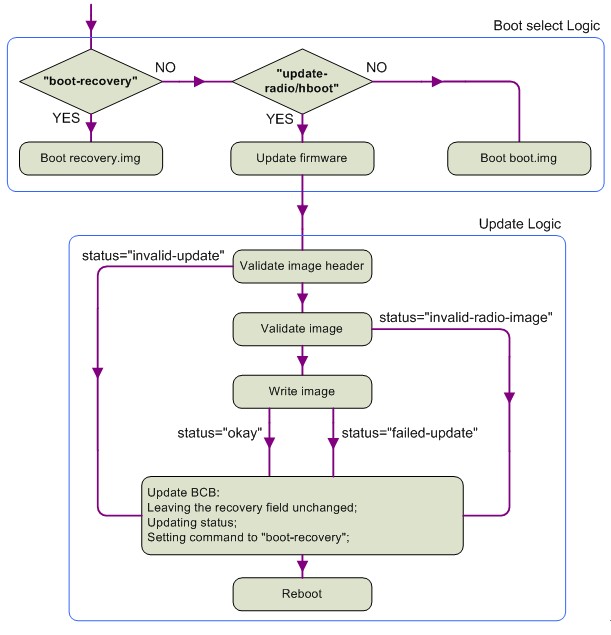
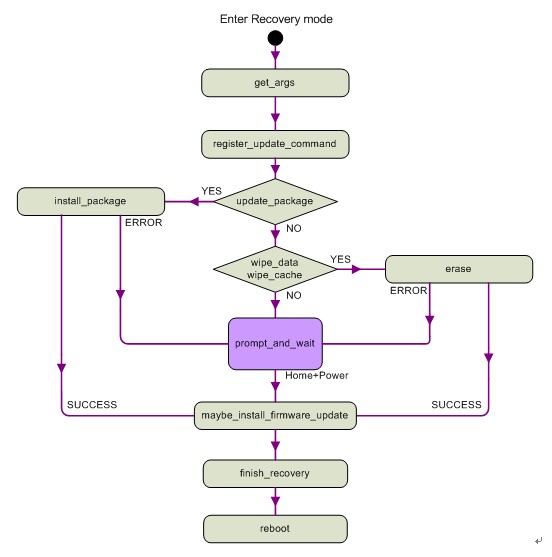
Recovery 运行流程
0
次点赞