RS485
定义
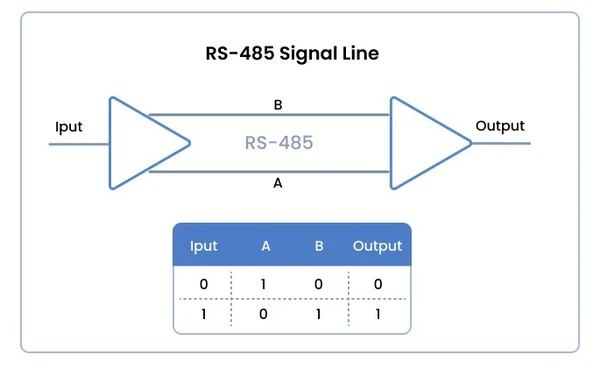
RS-485(目前称为EIA/TIA-485)是通信物理层的标准接口,一种信号传输方式, OSI(开放系统互连)模型的第一级。创建 RS-485 是为了扩展 RS-232 接口的物理功能。
串行 EIA-485 连接是使用两根或三根电线的电缆完成的:一根数据线、一根带反转数据的电线,通常还有一根零线(接地,0 V)
这里的主要思想是通过两根电线传输一个信号。当一根电线传输原始信号时,另一根电线传输其反向副本。这种传输方法提供了对共模干扰的高抵抗力。用作传输线的双绞线可以是屏蔽或非屏蔽的。
传输距离和速率
1200 米是 RS-485 通信中的最大电缆长度,可以达到100 kbits/s
通讯协议
在 RS485 通信协议中,命令由定义为主站的节点发送。连接到主站的所有其他节点通过 RS485 端口接收数据。根据发送的信息,线路上的零个或多个节点响应主站。
RS-485接口的主要优点是:
- 通过一对双绞线进行双向数据交换
- 支持连接到同一条线路的多个收发器,即创建网络的能力
- 通讯线长
- 高传输速度
RS485 与 RS232
| 协议 | RS232 | RS485 |
|---|---|---|
| 协议类型 | 双工 | 半双工 |
| 信号类型 | 不平衡 | 均衡 |
| 设备数量 | 1 个发射器和 1 个接收器 | 多达 32 个发射器和 43 个接收器 |
| 最大数据传输 | 19.2Kbps 15 米 | 10Mbps 15 米 |
| 最大电缆长度 | 约 15.25 米,19.2Kbps | 大约 1220 米,100 Kbps |
| 输出电流 | 500mA | 250mA |
| 最小输入电压 | +/- 3V | 0.2V 差分 |
SerialPort
public final class SerialPort {
static {
System.loadLibrary("serial_port");
}
// dev/ttyS3
private final File device;
// 9600
private final int baudrate;
private final int dataBits;
private final int parity;
private final int stopBits;
private final int flags;
/*
* Do not remove or rename the field mFd: it is used by native method close();
*/
private FileDescriptor mFd;
private FileInputStream mFileInputStream;
private FileOutputStream mFileOutputStream;
/**
* 串口
*
* @param device 串口设备文件
* @param baudrate 波特率
* @param dataBits 数据位;默认8,可选值为5~8
* @param parity 奇偶校验;0:无校验位(NONE,默认);1:奇校验位(ODD);2:偶校验位(EVEN)
* @param stopBits 停止位;默认1;1:1位停止位;2:2位停止位
* @param flags 默认0
* @throws SecurityException
* @throws IOException
*/
public SerialPort(@NonNull File device, int baudrate, int dataBits, int parity, int stopBits,
int flags) throws SecurityException, IOException {
this.device = device;
this.baudrate = baudrate;
this.dataBits = dataBits;
this.parity = parity;
this.stopBits = stopBits;
this.flags = flags;
mFd = open(device.getAbsolutePath(), baudrate, dataBits, parity, stopBits, flags);
if (mFd == null) {
Log.e(TAG, "native open returns null");
throw new IOException();
}
mFileInputStream = new FileInputStream(mFd);
mFileOutputStream = new FileOutputStream(mFd);
}
// Getters and setters
@NonNull
public InputStream getInputStream() {
return mFileInputStream;
}
@NonNull
public OutputStream getOutputStream() {
return mFileOutputStream;
}
// JNI
private native FileDescriptor open(String absolutePath, int baudrate, int dataBits, int parity,
int stopBits, int flags);
public native void close();
}
SerialPortActivity
public abstract class SerialPortActivity extends Activity {
protected SerialPort mSerialPort;
protected OutputStream mOutputStream;
private InputStream mInputStream;
private ReadThread mReadThread;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
try {
mSerialPort = getSerialPort();
mOutputStream = mSerialPort.getOutputStream();
mInputStream = mSerialPort.getInputStream();
/* Create a receiving thread */
mReadThread = new ReadThread();
mReadThread.start();
} catch (SecurityException e) {
DisplayError(R.string.error_security);
} catch (IOException e) {
DisplayError(R.string.error_unknown);
} catch (InvalidParameterException e) {
DisplayError(R.string.error_configuration);
}
}
@Override
protected void onDestroy() {
if (mReadThread != null) mReadThread.interrupt();
mApplication.closeSerialPort();
mSerialPort = null;
super.onDestroy();
}
public SerialPort getSerialPort()
throws SecurityException, IOException, InvalidParameterException {
if (mSerialPort == null) {
SerialPort serialPort = SerialPort //
.newBuilder("dev/ttyS3", 9600) // 串口地址地址,波特率
.parity(2) // 校验位;0:无校验位(NONE,默认);1:奇校验位(ODD);2:偶校验位(EVEN)
.dataBits(7) // 数据位,默认8;可选值为5~8
.stopBits(2) // 停止位,默认1;1:1位停止位;2:2位停止位
.build();
mSerialPort = serialPort;
}
return mSerialPort;
}
public void closeSerialPort() {
if (mSerialPort != null) {
mSerialPort.close();
mSerialPort = null;
}
}
private class ReadThread extends Thread {
@Override
public void run() {
super.run();
while (!isInterrupted()) {
int size;
try {
byte[] buffer = new byte[64];
if (mInputStream == null) return;
size = mInputStream.read(buffer);
if (size > 0) {
onDataReceived(buffer, size);
}
} catch (IOException e) {
e.printStackTrace();
return;
}
}
}
}
protected abstract void onDataReceived(final byte[] buffer, final int size);
}
ConsoleActivity
public class ConsoleActivity extends SerialPortActivity {
EditText mReception;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.console);
mReception = findViewById(R.id.EditTextReception);
EditText Emission = findViewById(R.id.EditTextEmission);
Emission.setOnEditorActionListener(new OnEditorActionListener() {
public boolean onEditorAction(TextView v, int actionId, KeyEvent event) {
int i;
CharSequence t = v.getText();
char[] text = new char[t.length()];
for (i = 0; i < t.length(); i++) {
text[i] = t.charAt(i);
}
try {
mOutputStream.write(new String(text).getBytes());
mOutputStream.write('\n');
} catch (IOException e) {
e.printStackTrace();
}
return false;
}
});
}
@Override
protected void onDataReceived(final byte[] buffer, final int size) {
runOnUiThread(() -> {
if (mReception != null) {
mReception.append(new String(buffer, 0, size));
}
});
}
}
JNI
SerialPort.h
/* DO NOT EDIT THIS FILE - it is machine generated */
#include <jni.h>
/* Header for class android_serialport_SerialPort */
#ifndef _Included_android_serialport_SerialPort
#define _Included_android_serialport_SerialPort
#ifdef __cplusplus
extern "C" {
#endif
/*
* Class: android_serialport_SerialPort
* Method: open
* Signature: (Ljava/lang/String;IIIII)Ljava/io/FileDescriptor;
*/
JNIEXPORT jobject JNICALL Java_android_serialport_SerialPort_open
(JNIEnv *, jobject, jstring, jint, jint, jint, jint, jint);
/*
* Class: android_serialport_SerialPort
* Method: close
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_android_serialport_SerialPort_close
(JNIEnv *, jobject);
#ifdef __cplusplus
}
#endif
#endif
/* Header for class android_serialport_SerialPort_Builder */
#ifndef _Included_android_serialport_SerialPort_Builder
#define _Included_android_serialport_SerialPort_Builder
#ifdef __cplusplus
extern "C" {
#endif
#ifdef __cplusplus
}
#endif
#endif
SerialPort.c
#include <termios.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
#include <jni.h>
#include "SerialPort.h"
#include "android/log.h"
static const char *TAG = "serial_port";
#define LOGI(fmt, args...) __android_log_print(ANDROID_LOG_INFO, TAG, fmt, ##args)
#define LOGD(fmt, args...) __android_log_print(ANDROID_LOG_DEBUG, TAG, fmt, ##args)
#define LOGE(fmt, args...) __android_log_print(ANDROID_LOG_ERROR, TAG, fmt, ##args)
static speed_t getBaudrate(jint baudrate) {
switch (baudrate) {
case 0:
return B0;
case 50:
return B50;
case 75:
return B75;
case 110:
return B110;
case 134:
return B134;
case 150:
return B150;
case 200:
return B200;
case 300:
return B300;
case 600:
return B600;
case 1200:
return B1200;
case 1800:
return B1800;
case 2400:
return B2400;
case 4800:
return B4800;
case 9600:
return B9600;
case 19200:
return B19200;
case 38400:
return B38400;
case 57600:
return B57600;
case 115200:
return B115200;
case 230400:
return B230400;
case 460800:
return B460800;
case 500000:
return B500000;
case 576000:
return B576000;
case 921600:
return B921600;
case 1000000:
return B1000000;
case 1152000:
return B1152000;
case 1500000:
return B1500000;
case 2000000:
return B2000000;
case 2500000:
return B2500000;
case 3000000:
return B3000000;
case 3500000:
return B3500000;
case 4000000:
return B4000000;
default:
return -1;
}
}
/*
* Class: android_serialport_SerialPort
* Method: open
* Signature: (Ljava/lang/String;II)Ljava/io/FileDescriptor;
*/
JNIEXPORT jobject JNICALL Java_android_serialport_SerialPort_open
(JNIEnv *env, jobject thiz, jstring path, jint baudrate, jint dataBits, jint parity,
jint stopBits,
jint flags) {
int fd;
speed_t speed;
jobject mFileDescriptor;
/* Check arguments */
{
speed = getBaudrate(baudrate);
if (speed == -1) {
/* TODO: throw an exception */
LOGE("Invalid baudrate");
return NULL;
}
}
/* Opening device */
{
jboolean iscopy;
const char *path_utf = (*env)->GetStringUTFChars(env, path, &iscopy);
LOGD("Opening serial port %s with flags 0x%x", path_utf, O_RDWR | flags);
fd = open(path_utf, O_RDWR | flags);
LOGD("open() fd = %d", fd);
(*env)->ReleaseStringUTFChars(env, path, path_utf);
if (fd == -1) {
/* Throw an exception */
LOGE("Cannot open port");
/* TODO: throw an exception */
return NULL;
}
}
/* Configure device */
{
struct termios cfg;
LOGD("Configuring serial port");
if (tcgetattr(fd, &cfg)) {
LOGE("tcgetattr() failed");
close(fd);
/* TODO: throw an exception */
return NULL;
}
cfmakeraw(&cfg);
cfsetispeed(&cfg, speed);
cfsetospeed(&cfg, speed);
cfg.c_cflag &= ~CSIZE;
switch (dataBits) {
case 5:
cfg.c_cflag |= CS5; //使用5位数据位
break;
case 6:
cfg.c_cflag |= CS6; //使用6位数据位
break;
case 7:
cfg.c_cflag |= CS7; //使用7位数据位
break;
case 8:
cfg.c_cflag |= CS8; //使用8位数据位
break;
default:
cfg.c_cflag |= CS8;
break;
}
switch (parity) {
case 0:
cfg.c_cflag &= ~PARENB; //无奇偶校验
break;
case 1:
cfg.c_cflag |= (PARODD | PARENB); //奇校验
break;
case 2:
cfg.c_iflag &= ~(IGNPAR | PARMRK); // 偶校验
cfg.c_iflag |= INPCK;
cfg.c_cflag |= PARENB;
cfg.c_cflag &= ~PARODD;
break;
default:
cfg.c_cflag &= ~PARENB;
break;
}
switch (stopBits) {
case 1:
cfg.c_cflag &= ~CSTOPB; //1位停止位
break;
case 2:
cfg.c_cflag |= CSTOPB; //2位停止位
break;
default:
cfg.c_cflag &= ~CSTOPB; //1位停止位
break;
}
if (tcsetattr(fd, TCSANOW, &cfg)) {
LOGE("tcsetattr() failed");
close(fd);
/* TODO: throw an exception */
return NULL;
}
}
/* Create a corresponding file descriptor */
{
jclass cFileDescriptor = (*env)->FindClass(env, "java/io/FileDescriptor");
jmethodID iFileDescriptor = (*env)->GetMethodID(env, cFileDescriptor, "<init>", "()V");
jfieldID descriptorID = (*env)->GetFieldID(env, cFileDescriptor, "descriptor", "I");
mFileDescriptor = (*env)->NewObject(env, cFileDescriptor, iFileDescriptor);
(*env)->SetIntField(env, mFileDescriptor, descriptorID, (jint) fd);
}
return mFileDescriptor;
}
/*
* Class: cedric_serial_SerialPort
* Method: close
* Signature: ()V
*/
JNIEXPORT void JNICALL Java_android_serialport_SerialPort_close
(JNIEnv *env, jobject thiz) {
jclass SerialPortClass = (*env)->GetObjectClass(env, thiz);
jclass FileDescriptorClass = (*env)->FindClass(env, "java/io/FileDescriptor");
jfieldID mFdID = (*env)->GetFieldID(env, SerialPortClass, "mFd", "Ljava/io/FileDescriptor;");
jfieldID descriptorID = (*env)->GetFieldID(env, FileDescriptorClass, "descriptor", "I");
jobject mFd = (*env)->GetObjectField(env, thiz, mFdID);
jint descriptor = (*env)->GetIntField(env, mFd, descriptorID);
LOGD("close(fd = %d)", descriptor);
close(descriptor);
}
Modbus
Modbus是一种被工业电子设备广泛使用的串行通信协议。在 Modbus 中,在主站(主机)和从站(基于 COM 的设备)* 之间建立连接。Modbus 有助于访问设备的配置并读取测量值。
数据交换由主机发起。主机可以自行将其 RS-485 驱动程序切换到传输模式,而其他 RS485 驱动程序(从机)工作在接收模式。为了让从设备通过通信线路应答主机,“主设备”向它发送一个特殊命令,该命令使目标设备有权将其驱动程序切换到传输模式一段时间
Modbus 是用于设备相互交互的最简单的协议之一。同时对于设备制造商来说很容易实现,这是它盛行的主要原因,同时对于一个工程师、程序员来说却很难,因为它把所有实现的困难都推到了他的肩上。最终的解决方案,需要他处理寄存器和变量的多页表、它们的地址、各种读写和数据转换功能。
Modbus RTU 采用二进制编码和 CRC 错误检查。这些选择是为了提高效率,也是 RTU 模式在工业环境中最常用的主要原因。您可能已经猜到,Modbus ASCII 在发送消息时使用 ASCII 字符。
Modbus 串行通信参数
MODBUS规约模式:RTU模式。
- 传输速率:2400 bps,4800bps,9600bps,19200bps。
- 串行口通讯数据格式:1 个起始位, 8 个数据位, 无校验位, 1个停止位。
- 通讯介质:推荐采用0.5mm的双绞线,不带屏蔽层。(原因是如果使用屏蔽双绞线,但现场接地处理不好反而影响通讯质量)。
- 应答时间:小于4.5个byte传输时间(帧间隔最小时间) + 10ms。
Modbus 报文
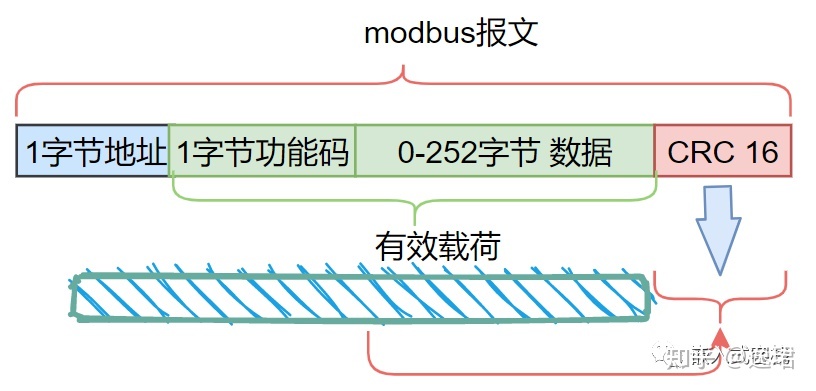
- 地址:取值范围是0-247,如果是0,就是主站广播报文;如果是1-247,则有可能是主站请求或者从站应答。
- 功能码:也就是报文命令,代表主站对从站的操作,读或者写
- 数据:数据字段,主请求报文,从应答报文会有所差异。也就是说假设抓取总线报文,如何区分是主站请求还是从站应答,则需要通过数据字段进行区分了。
- CRC校验:采样CRC16,16位循环冗余校验。
常用功能码
0x03:读取保持寄存器 0x06:写单个寄存器 0x10:写多个寄存器
读取保持寄存器
16位地址的寻址空间为64Kb (2^64)
主机发送Modbus RTU 报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 寄存器地址 | 寄存器数量 | CRC校验 |
|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 01 | 03 | 00 01 | 00 01 | D5 CA |
| Modbus RTU | 无 | 11 | 03 | 00 6B | 00 03 | D5 CA |
从站设备返回Modbus RTU报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 字节数 | 数据内容 | CRC校验 |
|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 01 | 03 | 02 | 00 09 | 78 42 |
| Modbus RTU | 无 | 11 | 03 | 06 | 02 2B 00 00 00 64 | 78 42 |
写单个寄存器
主机发送Modbus RTU/TCP报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 寄存器地址 | 数据内容 | CRC校验 |
|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 0B | 06 | 00 1D | 01 2C | 19 2B |
| Modbus RTU | 无 | 11 | 06 | 00 01 | 02 2B | 19 2B |
从站设备返回Modbus RTU/TCP报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 寄存器地址 | 数据内容 | CRC校验 |
|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 0B | 06 | 00 1D | 01 2C | 19 2B |
| Modbus RTU | 无 | 11 | 06 | 00 01 | 02 2B | 19 2B |
写多个寄存器
主机发送Modbus RTU/TCP报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 寄存器地址 | 寄存器数量 | 字节数 | 数据内容 | CRC校验 |
|---|---|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 0A | 10 | 00 1E | 00 02 | 04 | 00 00 75 30 | 70 8F |
| Modbus RTU | 无 | 11 | 10 | 00 01 | 00 02 | 04 | 02 2B 00 01 | 70 8F |
从站设备返回Modbus RTU/TCP报文如下:
| Modbus协议类型 | MBAP报文头 | 地址码 | 功能码 | 寄存器地址 | 寄存器数量 | CRC校验 |
|---|---|---|---|---|---|---|
| Modbus RTU | 无 | 0A | 10 | 00 1E | 00 02 | 20 B5 |
| Modbus RTU | 无 | 11 | 10 | 00 01 | 00 02 | 20 B5 |
modbus4j-java
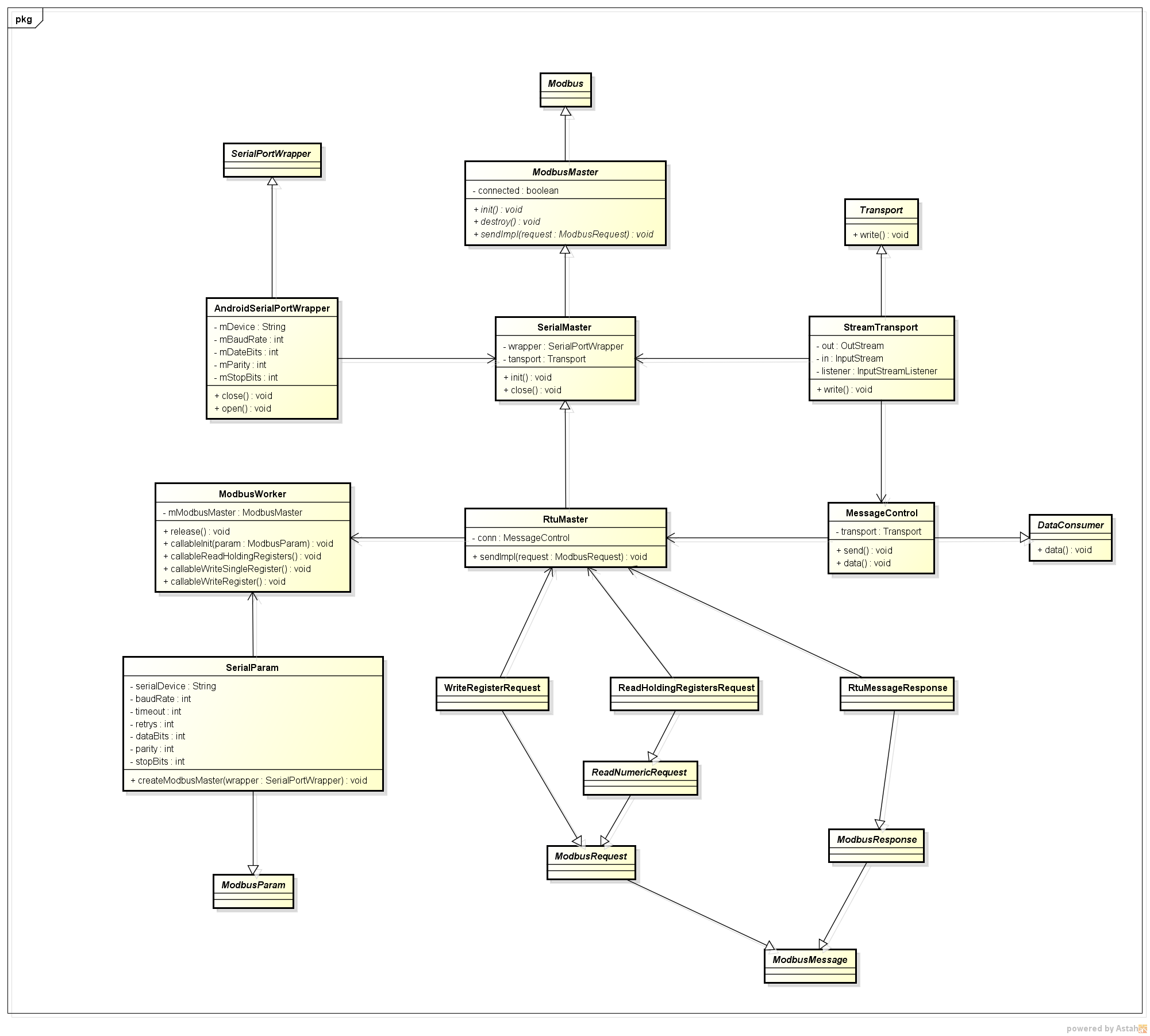
由 Infinite Automation Systems 和 Serotonin Software 用 Java 编写的 Modbus 协议的高性能和易于使用的实现。支持 ASCII、RTU、TCP 和 UDP 作为从站或主站传输,自动请求分区和响应数据类型解析。
- 主机Master及其子类:主机的入口,数据流的起点和终点。
- 数据端口类StreamTransport:负责数据的写入和读出。
- Modbus消息类ModbusMessage及其子类:支持Modbus定义的各种方法(FunctionCode)
- 收发数据控制类MessageControl:支持 timeout、retries,默认200ms,1次。
- 收发等待室WaitingRoom:负责同步收发逻辑。
- 输出Request消息类:OutgoingRequestMessage 及其子类。
- 收到Response消息类:IncomingResponseMessage 及其子类。
- 解析类MessageParser:负责解析收到的消息。
- 协议数据类型定义:DataType
- 协议功能码定义:FunctionCode
- 协议寄存器范围:RegisterRange
modbus 仿真工具
Modbus Slave 用于在 32 个窗口中模拟多达 32 个从设备!使用此仿真工具加速您的 PLC 编程
Modbus4Android
public class MainActivity extends BaseActivity {
private void openDevice() {
if (ModbusManager.get().isModbusOpened()) {
ModbusManager.get().closeModbusMaster();
updateDeviceSwitchButton();
return;
}
ModbusParam param;
if (mMode == MODE_SERIAL) {
// 串口
String path = mDevicePaths[mDeviceIndex];
int baudrate = mBaudrates[mBaudrateIndex];
mDeviceConfig.updateSerialConfig(path, baudrate);
param = SerialParam.create(path, baudrate) // 串口地址和波特率
.setDataBits(mDataBits) // 数据位
.setParity(mParity) // 校验位
.setStopBits(mStopBits) // 停止位
.setTimeout(1000).setRetries(0); // 不重试
} else {
// TCP
String host = mEtHost.getText().toString().trim();
int port = 0;
try {
port = Integer.parseInt(mEtPort.getText().toString().trim());
} catch (NumberFormatException e) {
//e.printStackTrace();
}
param = TcpParam.create(host, port)
.setTimeout(1000)
.setRetries(0)
.setEncapsulated(false)
.setKeepAlive(true);
}
ModbusManager.get().closeModbusMaster();
ModbusManager.get().init(param, new ModbusCallback<ModbusMaster>() {
@Override
public void onSuccess(ModbusMaster modbusMaster) {
showOneToast("打开成功");
}
@Override
public void onFailure(Throwable tr) {
showOneToast("打开失败," + tr);
}
@Override
public void onFinally() {
updateDeviceSwitchButton();
}
});
}
private void send03() {
if (checkSlave() && checkOffset() && checkAmount()) {
ModbusManager.get()
.readHoldingRegisters(mSalveId, mOffset, mAmount,
new ModbusCallback<ReadHoldingRegistersResponse>() {
@Override
public void onSuccess(
ReadHoldingRegistersResponse readHoldingRegistersResponse) {
byte[] data = readHoldingRegistersResponse.getData();
appendText("F03读取:" + ByteUtil.bytes2HexStr(data) + "\n");
}
@Override
public void onFailure(Throwable tr) {
appendError("F03", tr);
}
@Override
public void onFinally() {
}
});
}
}
private void send06() {
if (checkSlave() && checkOffset() && checkRegValue()) {
ModbusManager.get()
.writeSingleRegister(mSalveId, mOffset, mRegValue,
new ModbusCallback<WriteRegisterResponse>() {
@Override
public void onSuccess(WriteRegisterResponse writeRegisterResponse) {
appendText("F06写入成功\n");
}
@Override
public void onFailure(Throwable tr) {
appendError("F06", tr);
}
@Override
public void onFinally() {
}
});
}
}
}
ModbusWorker
/**
* ModbusWorker实现,实现了初始化modbus,并增加了线圈、离散量输入、寄存器的读写方法
*/
public class ModbusWorker implements IModbusWorker {
private final ExecutorService mRequestExecutor;
protected ModbusMaster mModbusMaster;
private long mSendTime;
private long mSendIntervalTime;
public ModbusWorker() {
// modbus请求用的单一线程池
mRequestExecutor = Executors.newSingleThreadExecutor();
}
/**
* 初始化modbus
*
* @param param
* @param callback
*/
@Override
public void init(final ModbusParam param, final ModbusCallback<ModbusMaster> callback) {
rxInit(param).observeOn(AndroidSchedulers.mainThread()).doFinally(new Action() {
@Override
public void run() throws Exception {
try {
callback.onFinally();
} catch (Exception e) {
e.printStackTrace();
}
}
}).subscribe(new Observer<ModbusMaster>() {
@Override
public void onSubscribe(Disposable d) {
}
@Override
public void onNext(ModbusMaster modbusMaster) {
try {
callback.onSuccess(modbusMaster);
} catch (Exception e) {
e.printStackTrace();
}
}
@Override
public void onError(Throwable e) {
try {
callback.onFailure(e);
} catch (Exception e1) {
e1.printStackTrace();
}
}
@Override
public void onComplete() {
}
});
}
/**
* 初始化modbus
*
* @param param
* @return
*/
@Override
public Observable<ModbusMaster> rxInit(final ModbusParam param) {
return getRxObservable(callableInit(param)).subscribeOn(Schedulers.io());
}
/**
* 初始化的Callable
*
* @param param
* @return
*/
@NonNull
private Callable<ModbusMaster> callableInit(final ModbusParam param) {
return new Callable<ModbusMaster>() {
@Override
public ModbusMaster call() throws Exception {
// 重置发送时间
mSendTime = 0;
if (mModbusMaster != null) {
mModbusMaster.destroy();
mModbusMaster = null;
}
ModbusMaster master = param.createModbusMaster();
try {
if (master == null) {
throw new ModbusInitException("Invalid ModbusParam!");
}
master.init();
} catch (ModbusInitException e) {
Log.w(TAG, "ModbusMaster init failed", e);
if (master != null) {
master.destroy();
}
// 再抛出异常
throw e;
}
mModbusMaster = master;
return master;
}
};
}
}
SerialParam
public class SerialParam implements ModbusParam<SerialParam> {
/**
* 串口设备
*/
private String serialDevice;
/**
* 串口波特率
*/
private int baudRate;
/**
* 超时
*/
private int timeout = DEFAULT_TIMEOUT;
/**
* 重试
*/
private int retries = 2;
/**
* 数据位
*/
private int dataBits = 8;
/**
* 校验位
*/
private int parity = 0;
/**
* 停止位
*/
private int stopBits = 1;
private SerialParam() {
}
public static SerialParam create(String serialDevice, int baudRate) {
SerialParam param = new SerialParam();
param.serialDevice = serialDevice;
param.baudRate = baudRate;
return param;
}
@Override
public ModbusMaster createModbusMaster() {
ModbusFactory modbusFactory = new ModbusFactory();
SerialPortWrapper wrapper =
new AndroidSerialPortWrapper(getSerialDevice(), getBaudRate(), getDataBits(),
getParity(), getStopBits());
ModbusMaster master = modbusFactory.createRtuMaster(wrapper);
master.setRetries(getRetries());
master.setTimeout(getTimeout());
return master;
}
}
AndroidSerialPortWrapper
/**
* modbus的Android串口实现
*/
public class AndroidSerialPortWrapper implements SerialPortWrapper {
private final String mDevice;
private final int mBaudRate;
private final int mDataBits;
private final int mParity;
private final int mStopBits;
private BufferedInputStream mInputStream;
private BufferedOutputStream mOutputStream;
private SerialPort mSerialPort;
public AndroidSerialPortWrapper(String device, int baudRate, int dataBits, int parity,
int stopBits) {
mDevice = device;
mBaudRate = baudRate;
mDataBits = dataBits;
mParity = parity;
mStopBits = stopBits;
}
@Override
public void close() throws Exception {
if (mInputStream != null) {
try {
mInputStream.close();
} catch (IOException e) {
e.printStackTrace();
} finally {
mInputStream = null;
}
}
if (mOutputStream != null) {
try {
mOutputStream.close();
} catch (IOException e) {
e.printStackTrace();
} finally {
mOutputStream = null;
}
}
if (mSerialPort != null) {
try {
mSerialPort.close();
} catch (Exception e) {
e.printStackTrace();
}
}
}
@Override
public void open() throws Exception {
mSerialPort = SerialPort //
.newBuilder(mDevice, mBaudRate)
.parity(mParity)
.dataBits(mDataBits)
.stopBits(mStopBits)
.build();
mInputStream = new BufferedInputStream(mSerialPort.getInputStream());
mOutputStream = new BufferedOutputStream(mSerialPort.getOutputStream());
}
}
RtuMaster
public class RtuMaster extends SerialMaster {
// Runtime fields.
private MessageControl conn;
/**
* <p>Constructor for RtuMaster.</p>
*
* Default to validating the slave id in responses
*
* @param wrapper a {@link com.serotonin.modbus4j.serial.SerialPortWrapper} object.
*/
public RtuMaster(SerialPortWrapper wrapper) {
super(wrapper, true);
}
@Override
public void init() throws ModbusInitException {
super.init();
RtuMessageParser rtuMessageParser = new RtuMessageParser(true);
conn = getMessageControl();
try {
conn.start(transport, rtuMessageParser, null, new SerialWaitingRoomKeyFactory());
if (getePoll() == null)
((StreamTransport) transport).start("Modbus RTU master");
}
catch (IOException e) {
throw new ModbusInitException(e);
}
initialized = true;
}
@Override
public ModbusResponse sendImpl(ModbusRequest request) throws ModbusTransportException {
// Wrap the modbus request in an rtu request.
RtuMessageRequest rtuRequest = new RtuMessageRequest(request);
// Send the request to get the response.
RtuMessageResponse rtuResponse;
try {
rtuResponse = (RtuMessageResponse) conn.send(rtuRequest);
if (rtuResponse == null)
return null;
return rtuResponse.getModbusResponse();
}
catch (Exception e) {
throw new ModbusTransportException(e, request.getSlaveId());
}
finally {
}
}
}
SerialMaster
abstract public class SerialMaster extends ModbusMaster {
// Runtime fields.
protected SerialPortWrapper wrapper;
protected Transport transport;
public SerialMaster(SerialPortWrapper wrapper, boolean validateResponse) {
this.wrapper = wrapper;
this.validateResponse = validateResponse;
}
/** {@inheritDoc} */
@Override
public void init() throws ModbusInitException {
try {
this.wrapper.open();
if (getePoll() != null)
transport = new EpollStreamTransport(wrapper.getInputStream(), wrapper.getOutputStream(),
getePoll());
else
transport = new StreamTransport(wrapper.getInputStream(), wrapper.getOutputStream());
}
catch (Exception e) {
throw new ModbusInitException(e);
}
}
}
MessageControl
public class MessageControl implements DataConsumer {
private Transport transport;
private MessageParser messageParser;
public void start(Transport transport, MessageParser messageParser, RequestHandler handler,
WaitingRoomKeyFactory waitingRoomKeyFactory) throws IOException {
this.transport = transport;
this.messageParser = messageParser;
this.requestHandler = handler;
this.waitingRoomKeyFactory = waitingRoomKeyFactory;
waitingRoom.setKeyFactory(waitingRoomKeyFactory);
transport.setConsumer(this);
}
public IncomingResponseMessage send(OutgoingRequestMessage request, int timeout, int retries) throws IOException {
byte[] data = request.getMessageData();
if (DEBUG||ModbusConfig.isEnalbeSendLog())
System.out.println("MessagingControl.send: " + StreamUtils.dumpHex(data));
IncomingResponseMessage response = null;
if (request.expectsResponse()) {
WaitingRoomKey key = waitingRoomKeyFactory.createWaitingRoomKey(request);
// Enter the waiting room
waitingRoom.enter(key);
try {
do {
// Send the request.
write(data);
// Wait for the response.
response = waitingRoom.getResponse(key, timeout);
if (DEBUG && response == null)
System.out.println("Timeout waiting for response");
}
while (response == null && retries-- > 0);
}
finally {
// Leave the waiting room.
waitingRoom.leave(key);
}
if (response == null)
throw new TimeoutException("request=" + request);
}
else
write(data);
return response;
}
}