字符设备
字符设备通过字符以流的方式向用户程序传递数据,就像串行端口那样。字符设备驱动通过/dev目录下的特殊文件公开设备的属性和功能,通过这个文件可以在设备和用户应用程序之间交换数据,也可以通过它来控制实际的物理设备。
kernel/include/linux/cdev.h
#ifndef _LINUX_CDEV_H
#define _LINUX_CDEV_H
#include <linux/kobject.h>
#include <linux/kdev_t.h>
#include <linux/list.h>
struct file_operations;
struct inode;
struct module;
struct cdev {
struct kobject kobj;
struct module *owner;
const struct file_operations *ops;
struct list_head list;
dev_t dev; // 描述主设备和次设备号
unsigned int count;
};
void cdev_init(struct cdev *, const struct file_operations *);
struct cdev *cdev_alloc(void);
void cdev_put(struct cdev *p);
int cdev_add(struct cdev *, dev_t, unsigned);
void cdev_del(struct cdev *);
void cd_forget(struct inode *);
#endif
设备文件操作
每一列的第一个字符代表设备类型
- c: 字符设备文件
- b: 块设备文件
- l: 符号链接
- d: 目录
- s: 套接字
- p: 命名管道
# ls -al dev/
total 8
drwxr-xr-x 18 root root 1680 2022-03-21 15:19 .
drwxrwxrwt 18 root root 1140 2022-03-21 15:19 ..
---------- 1 root root 0 2022-03-21 15:19 .coldboot_done
drwxr-xr-x 2 root root 820 2022-03-21 15:19 __properties__
crw-rw-rw- 1 root root 10, 58 2022-03-21 15:19 ashmem
crw-rw-rw- 1 root root 10, 56 2022-03-21 15:19 binder
drwxr-xr-x 4 root root 960 2022-03-21 15:19 block
drwxr-xr-x 3 root root 60 2022-03-21 15:19 bus
crw-rw-r-- 1 media camera 10, 59 2022-03-21 15:19 camsys_marvin
crw------- 1 root root 250, 0 2022-03-21 15:19 cec0
crw------- 1 root root 5, 1 2022-03-21 15:19 console
crw------- 1 root root 10, 52 2022-03-21 15:19 cpu_dma_latency
dr-xr-xr-x 3 system system 0 2022-03-21 15:19 cpuctl
dr-xr-xr-x 6 system system 0 2022-03-21 15:19 cpuset
crw------- 1 root root 10, 236 2022-03-21 15:19 device-mapper
drwxr-xr-x 2 root root 100 2022-03-21 15:19 dri
lrwxrwxrwx 1 root root 13 2022-03-21 15:19 fd -> /proc/self/fd
drwxrwx--- 2 root system 40 2022-03-21 15:21 fscklogs
crw-rw-rw- 1 root root 1, 7 2022-03-21 15:19 full
crw------- 1 root root 10, 229 2022-03-21 15:19 fuse
drwxr-xr-x 2 root root 60 2022-03-21 15:19 graphics
crw------- 1 root root 10, 46 2022-03-21 15:19 hdmi_hdcp1x
crw-rw-rw- 1 media media 244, 0 2022-03-21 15:19 hevc-service
crw------- 1 root root 239, 0 2022-03-21 15:19 hidraw0
crw------- 1 root root 10, 55 2022-03-21 15:19 hwbinder
crw------- 1 root root 89, 0 2022-03-21 15:19 i2c-0
crw-rw---- 1 system system 89, 1 2022-03-21 15:19 i2c-1
crw------- 1 root root 89, 2 2022-03-21 15:19 i2c-2
crw------- 1 root root 89, 3 2022-03-21 15:19 i2c-3
crw------- 1 root root 89, 4 2022-03-21 15:19 i2c-4
crw------- 1 root root 89, 6 2022-03-21 15:19 i2c-6
crw-rw-rw- 1 media media 10, 61 2022-03-21 15:19 iep
crw-rw---- 1 system system 247, 0 2022-03-21 15:19 iio:device0
drwxr-xr-x 2 root root 80 2022-03-21 15:19 input
lrwxrwxrwx 1 root root 10 2022-03-21 15:19 jlb -> /dev/ttyS3
crw------- 1 root root 10, 60 2022-03-21 15:19 keychord
crw------- 1 root root 1, 11 2022-03-21 15:19 kmsg
crw------- 1 root root 10, 237 2022-03-21 15:19 loop-control
crw-rw-rw- 1 system system 10, 47 2022-03-21 15:19 mali0
crw------- 1 media media 1, 1 2022-03-21 15:19 mem
dr-xr-xr-x 3 root root 0 2022-03-21 15:19 memcg
crw------- 1 root root 10, 49 2022-03-21 15:19 memory_bandwidth
crw-rw---- 1 root mtp 10, 43 2022-03-21 15:19 mtp_usb
crw------- 1 root root 10, 51 2022-03-21 15:19 network_latency
crw------- 1 root root 10, 50 2022-03-21 15:19 network_throughput
crw-rw-rw- 1 root root 1, 3 2022-03-21 15:19 null
crw-rw-rw- 1 root root 10, 62 2022-03-21 15:19 opteearmtz00
c-w--w--w- 1 root log 253, 0 2022-03-21 15:19 pmsg0
crw-rw---- 1 radio vpn 108, 0 2022-03-21 15:19 ppp
crw-rw-rw- 1 root root 5, 2 2022-03-21 15:27 ptmx
drwxr-xr-x 2 root root 0 1970-01-01 08:00 pts
crw-rw-rw- 1 root root 1, 8 2022-03-21 15:19 random
crw------- 1 root root 10, 63 2022-03-21 15:19 rfkill
crw-rw-rw- 1 system system 10, 48 2022-03-21 15:19 rga
crw-r----- 1 system system 252, 0 2022-03-21 15:19 rtc0
crw-rw---- 1 bluetooth net_bt_stack 240, 0 2022-03-21 15:19 rtk_btusb
lrwxrwxrwx 1 root root 10 2022-03-21 15:19 s3c2410_serial3 -> /dev/ttyS3
drwxr-xr-x 2 root root 120 2022-03-21 15:19 snd
drwxr-xr-x 2 root root 400 2022-03-21 15:20 socket
drwxr-xr-x 5 system system 100 2022-03-21 15:19 stune
crw-rw-rw- 1 system system 10, 57 2022-03-21 15:19 sw_sync
crw-rw-rw- 1 root root 5, 0 2022-03-21 15:19 tty
crw------- 1 root root 254, 0 2022-03-21 15:19 ttyFIQ0
crw-rw---- 1 bluetooth net_bt_stack 4, 64 2022-03-21 15:19 ttyS0
crwxrwxrwx 1 root root 4, 65 2022-03-21 15:19 ttyS1
crwxrwxrwx 1 root root 4, 66 2022-03-21 15:19 ttyS2
crwxrwxrwx 1 root root 4, 67 2022-03-21 15:19 ttyS3
crwxrwxrwx 1 root root 4, 68 2022-03-21 15:19 ttyS4
crw-rw---- 1 radio radio 188, 0 2022-03-21 15:19 ttyUSB0
crw-rw---- 1 radio radio 188, 1 2022-03-21 15:27 ttyUSB1
crw-rw---- 1 radio radio 188, 2 2022-03-21 15:19 ttyUSB2
crw-rw---- 1 system vpn 10, 200 2022-03-21 15:19 tun
crw-rw---- 1 system net_bt_stack 10, 239 2022-03-21 15:19 uhid
crw-rw---- 1 system net_bt_stack 10, 223 2022-03-21 15:19 uinput
crw-rw-rw- 1 root root 1, 9 2022-03-21 15:19 urandom
drwxr-xr-x 2 root root 140 2022-03-21 15:19 usb
drwxrwx--- 3 shell shell 60 2022-03-21 15:19 usb-ffs
crw-rw---- 1 root usb 10, 44 2022-03-21 15:19 usb_accessory
crw-rw-r-- 1 bluetooth net_bt_stack 10, 45 2022-03-21 15:19 vendor_storage
-rw------- 1 root root 1 2022-03-21 15:20 video_state
crw------- 1 root root 10, 54 2022-03-21 15:19 vndbinder
crw-rw-rw- 1 media media 245, 0 2022-03-21 15:19 vpu-service
crw-r--r-- 1 root root 10, 53 2022-03-21 15:19 xt_qtaguid
crw-rw-rw- 1 root root 1, 5 2022-03-21 15:19 zero
第五六列代表主设备号和从设备号,设备注册时,必须使用主设备号和次设备号,前者标识这个设备,后者用作本地设备列表中的数组索引,因为同一个驱动程序的一个实例可以处理多个设备,而不同的驱动程序可以处理相同类型的不同设备
设备号的分配和释放
设备号在系统范围内标识设备文件,设备号的分配有两种方法,静态方法(register_chrdev_region)和动态方法(allo_chrdev_region)
设备文件操作
kernel/drivers/tty/tty_io.c
static const struct file_operations tty_fops = {
.llseek = no_llseek,
.read = tty_read,
.write = tty_write,
.poll = tty_poll,
.unlocked_ioctl = tty_ioctl,
.compat_ioctl = tty_compat_ioctl,
.open = tty_open,
.release = tty_release,
.fasync = tty_fasync,
};
kernel/drivers/include/linux/fs.h
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iterate) (struct file *, struct dir_context *);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
};
每一个回调函数都和系统调用链接到一起,当用户代码在指定文件上调用与文件相关的系统调用时,内核会查找负责这个文件的驱动程序,定位它的struct file_operations结构,并检查和该系统调用匹配的方法是否已经定义, 如果定义了就运行它; 如果未定义则返回相应的错误码。
内核中的文件表示
内核把文件结构描述为inode结构的实例,定义在kernel/drivers/include/linux/fs.h
struct inode {
union {
struct pipe_inode_info *i_pipe; // linux 内核管道
struct block_device *i_bdev; // 块设比
struct cdev *i_cdev; // 字符设备
char *i_link;
};
}
struct file {
union {
struct llist_node fu_llist;
struct rcu_head fu_rcuhead;
} f_u;
struct path f_path; // 文件路径
struct inode *f_inode; /* cached value */ // 此文件相关的inode
const struct file_operations *f_op; // 可以在此文件上执行的操作
/*
* Protects f_ep_links, f_flags.
* Must not be taken from IRQ context.
*/
spinlock_t f_lock;
atomic_long_t f_count;
unsigned int f_flags;
fmode_t f_mode;
struct mutex f_pos_lock;
loff_t f_pos; // 此文件中光标的位置
struct fown_struct f_owner;
const struct cred *f_cred;
struct file_ra_state f_ra;
u64 f_version;
/* needed for tty driver, and maybe others */
void *private_data; // 驱动程序可以设置的私有数据,以便在文件操作之间共享
struct inode 是文件系统的数据结构,它只与操作系统有关,用于保存文件和目录,不跟踪文件的当前位置当前模式,它只是帮助操作系统找到底层文件结构的内容。
struct file 是更高级的文件描述,它代表内核中打开的文件,依赖于低层的stuct inode结构
struct inode 代表内核中的文件,struct file描述实际打开的文件。同一个文件打开多次时,可能会有不同的文件描述符,但它们都指向同一个inode
分配和注册字符设备
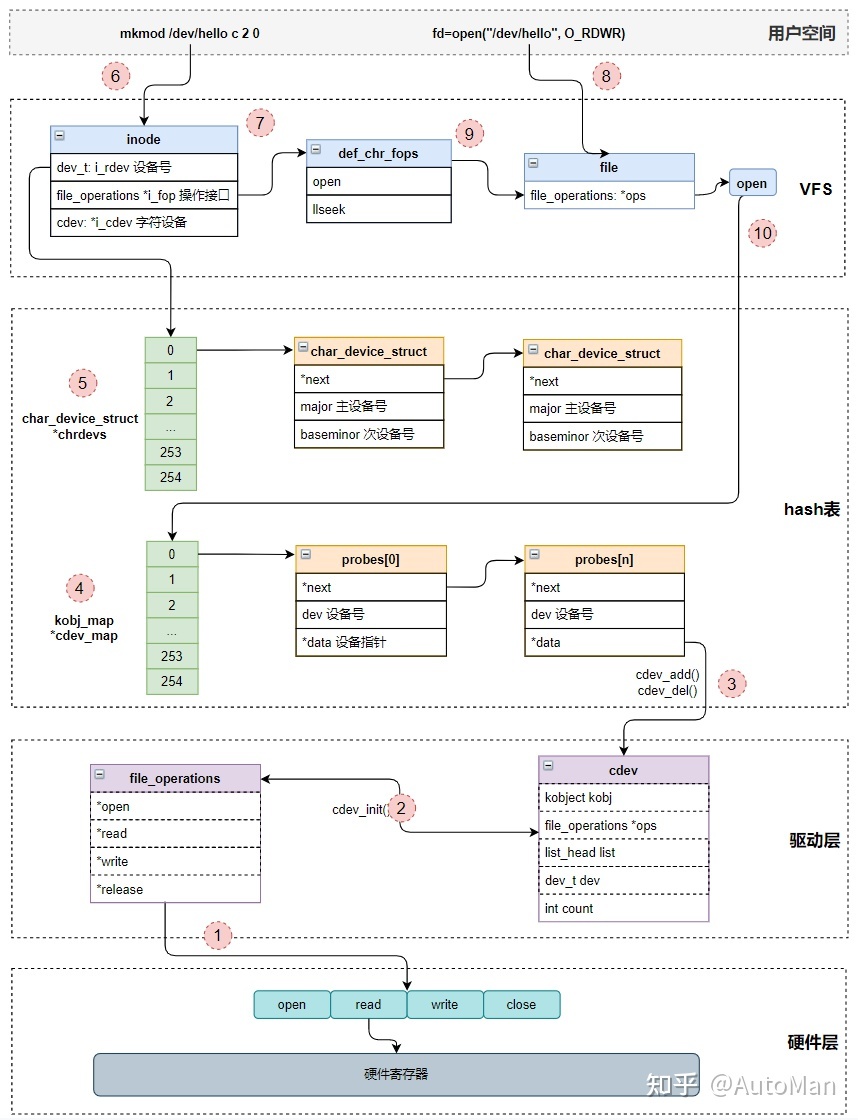
字符设备在内核中表示为struct cdev的实例。在编写字符设备驱动程序时,目标是最终创建并注册与struct file_operation关联的结构实例,为用户空间提供一组可以在该设备上执行的操作,为了这个目标需要几个步骤:
- 使用alloc_chrdev_region()保留一个主设备号和一定范围的次设备号
- 使用class_create()创建自己的设备类
- 创建一个struct file_operation(传递给cdev_init), 每一个设备都需要创建,并调用call_init()和cdev_add() 注册这个设备
- 调用device_create()创建每个设备,并给它们一个合适的名字,这样就可以在/dev目录下创建设备
串口设备tty
kernel/drivers/tty/tty_io.c
static const struct file_operations tty_fops = {
.llseek = no_llseek,
.read = tty_read,
.write = tty_write,
.poll = tty_poll,
.unlocked_ioctl = tty_ioctl,
.compat_ioctl = tty_compat_ioctl,
.open = tty_open,
.release = tty_release,
.fasync = tty_fasync,
};
/*
* Called by a tty driver to register itself.
*/
int tty_register_driver(struct tty_driver *driver)
{
int error;
int i;
dev_t dev;
struct device *d;
if (!driver->major) {
error = alloc_chrdev_region(&dev, driver->minor_start,
driver->num, driver->name);
if (!error) {
driver->major = MAJOR(dev);
driver->minor_start = MINOR(dev);
}
} else {
dev = MKDEV(driver->major, driver->minor_start);
error = register_chrdev_region(dev, driver->num, driver->name);
}
if (error < 0)
goto err;
if (driver->flags & TTY_DRIVER_DYNAMIC_ALLOC) {
error = tty_cdev_add(driver, dev, 0, driver->num);
if (error)
goto err_unreg_char;
}
mutex_lock(&tty_mutex);
list_add(&driver->tty_drivers, &tty_drivers);
mutex_unlock(&tty_mutex);
if (!(driver->flags & TTY_DRIVER_DYNAMIC_DEV)) {
for (i = 0; i < driver->num; i++) {
d = tty_register_device(driver, i, NULL);
if (IS_ERR(d)) {
error = PTR_ERR(d);
goto err_unreg_devs;
}
}
}
proc_tty_register_driver(driver);
driver->flags |= TTY_DRIVER_INSTALLED;
return 0;
err_unreg_devs:
for (i--; i >= 0; i--)
tty_unregister_device(driver, i);
mutex_lock(&tty_mutex);
list_del(&driver->tty_drivers);
mutex_unlock(&tty_mutex);
err_unreg_char:
unregister_chrdev_region(dev, driver->num);
err:
return error;
}
EXPORT_SYMBOL(tty_register_driver);
// 创建设备类,在sys/class中可见
static int __init tty_class_init(void)
{
tty_class = class_create(THIS_MODULE, "tty");
if (IS_ERR(tty_class))
return PTR_ERR(tty_class);
tty_class->devnode = tty_devnode;
return 0;
}
postcore_initcall(tty_class_init);
/*
* Ok, now we can initialize the rest of the tty devices and can count
* on memory allocations, interrupts etc..
*/
int __init tty_init(void)
{
//将file_operation绑定到cdev
cdev_init(&tty_cdev, &tty_fops);
//让用户访问设备
if (cdev_add(&tty_cdev, MKDEV(TTYAUX_MAJOR, 0), 1) ||
register_chrdev_region(MKDEV(TTYAUX_MAJOR, 0), 1, "/dev/tty") < 0)
panic("Couldn't register /dev/tty driver\n");
device_create(tty_class, NULL, MKDEV(TTYAUX_MAJOR, 0), NULL, "tty");
cdev_init(&console_cdev, &console_fops);
if (cdev_add(&console_cdev, MKDEV(TTYAUX_MAJOR, 1), 1) ||
register_chrdev_region(MKDEV(TTYAUX_MAJOR, 1), 1, "/dev/console") < 0)
panic("Couldn't register /dev/console driver\n");
consdev = device_create_with_groups(tty_class, NULL,
MKDEV(TTYAUX_MAJOR, 1), NULL,
cons_dev_groups, "console");
if (IS_ERR(consdev))
consdev = NULL;
#ifdef CONFIG_VT
vty_init(&console_fops);
#endif
return 0;
}
设备中的class节点
rk3288:/ $ ls -al sys/class/tty/
total 0
drwxr-xr-x 2 root root 0 2021-01-01 20:00 .
drwxr-xr-x 74 root root 0 2021-01-01 20:00 ..
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 console -> ../../devices/virtual/tty/console
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ptmx -> ../../devices/virtual/tty/ptmx
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 tty -> ../../devices/virtual/tty/tty
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyFIQ0 -> ../../devices/platform/fiq_debugger.0/tty/ttyFIQ0
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyS0 -> ../../devices/platform/ff180000.serial/tty/ttyS0
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyS1 -> ../../devices/platform/ff190000.serial/tty/ttyS1
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyS2 -> ../../devices/platform/ff690000.serial/tty/ttyS2
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyS3 -> ../../devices/platform/ff1b0000.serial/tty/ttyS3
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyS4 -> ../../devices/platform/ff1c0000.serial/tty/ttyS4
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyUSB0 -> ../../devices/platform/ff500000.usb/usb2/2-1/2-1:1.2/ttyUSB0/tty/ttyUSB0
lrwxrwxrwx 1 root root 0 2022-03-22 14:51 ttyUSB1 -> ../../devices/platform/ff500000.usb/usb2/2-1/2-1:1.3/ttyUSB1/tty/ttyUSB1
写文件操作
../include/asm-generic/uaccess.h
//*to是内核空间的指针,*from是用户空间指针,n表示从用户空间想内核空间拷贝数据的字节数
static inline long copy_from_user(void *to,
const void __user * from, unsigned long n)
{
unsigned long res = n;
might_fault();
if (likely(access_ok(VERIFY_READ, from, n)))
res = __copy_from_user(to, from, n);
if (unlikely(res))
memset(to + (n - res), 0, res);
return res;
}
static inline long copy_to_user(void __user *to,
const void *from, unsigned long n)
{
might_fault();
if (access_ok(VERIFY_WRITE, to, n))
return __copy_to_user(to, from, n);
else
return n;
}
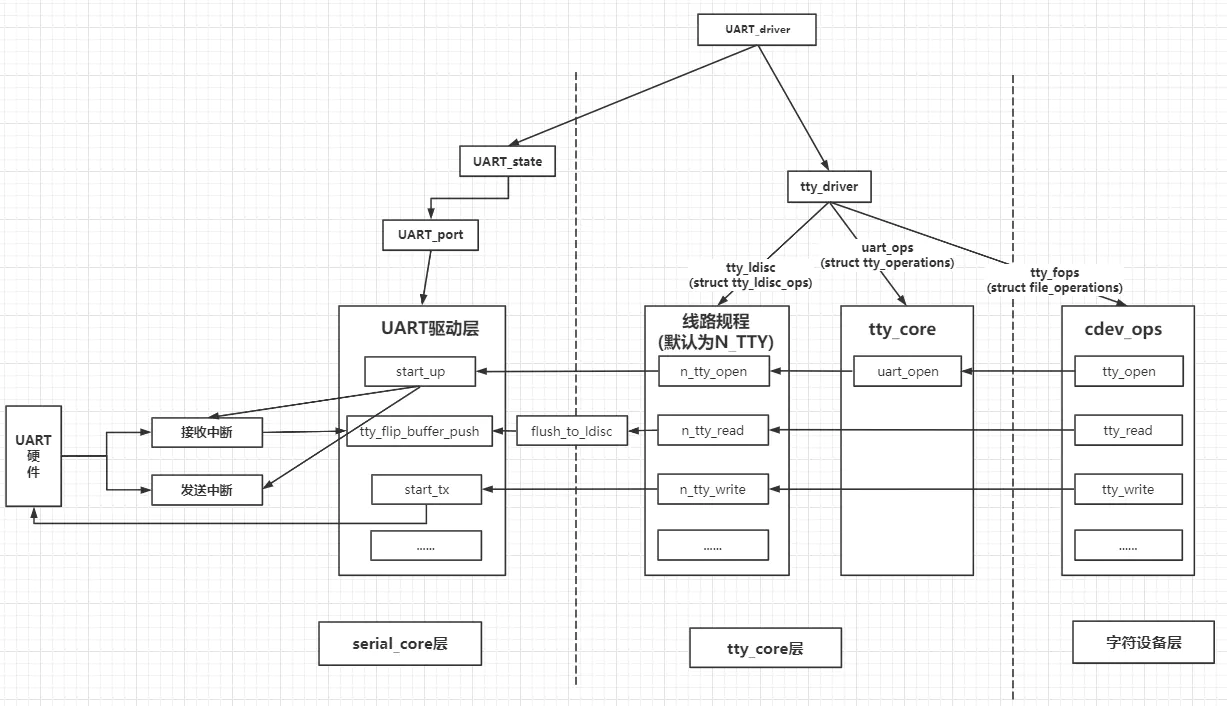
Linux 串口驱动
文件操作
open
open方法在每次打开设备文件时被调用,执行open时,将把struct inode作为参数传递给函数,inode是文件在内核的底层表示。struct inode结构内的i_cdev字段指向在init函数中分配出来的cdev.
static int tty_open(struct inode *inode, struct file *filp) {
dev_t device = inode->i_rdev;
}
release
与open方法相反,release方法在设备关闭时调用,之后撤销在open任务中已经执行的所有操作。
- 释放在open()阶段分配的所有私有内存
- 关闭设备(如果支持关闭), 并且丢弃上次关闭时的所有缓冲区
int tty_release(struct inode *inode, struct file *filp) {
}
write
write()方法用于向设备发送数据,每当用户调用设备文件上的write函数时,就会调用其内核实现
static ssize_t tty_write(struct file *file, const char __user *buf,
size_t count, loff_t *ppos)
{
//------------------------------------------------------
/* Do the write .. */
for (;;) {
size_t size = count;
if (size > chunk)
size = chunk;
ret = -EFAULT;
if (copy_from_user(tty->write_buf, buf, size))
break;
ret = write(tty, file, tty->write_buf, size);
if (ret <= 0)
break;
written += ret;
buf += ret;
count -= ret;
if (!count)
break;
ret = -ERESTARTSYS;
if (signal_pending(current))
break;
cond_resched();
}
//-------------------------------------------------------
}
- 返回值是写入的字节数
- buf表示来自用户空间的数据缓冲区
- count是请求传输的数据的长度
- ppos表示数据在文件中应写入的起始位置
read
static ssize_t tty_read(struct file *file, char __user *buf, size_t count,
loff_t *ppos)
{
struct inode *inode = file_inode(file);
}
- buf: 用户空间接收的缓冲区
- count: 请求传输的数据的大小(用户缓冲区的大小)
- ppos: 文件中读取数据的起始位置
llseek
在文件中移动光标位置时会使用此方法
loff_t default_llseek(struct file *file, loff_t offset, int whence);
- offset: 相对于文件当前位置的偏移量
- whence: 定义从哪里开始查找 SEEK_SET, SEEK_CUR, SEEK_END
poll
如果需要实现被动等待 (在感知字符设备时不浪费CPU周期),则必须实现poll函数,每当用户空间程序与设备关联的文件上执行系统调用select()或者poll()时,都会调用poll函数
static unsigned int tty_poll(struct file *filp, poll_table *wait)
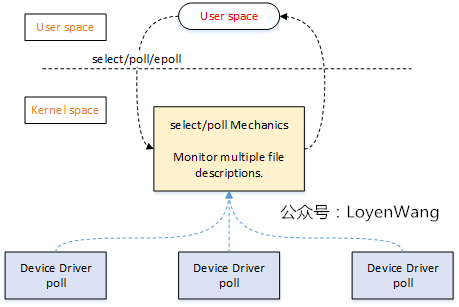
I/O多路复用(multiplexing)的本质是通过一种机制(系统内核缓冲I/O数据),让单个进程可以监视多个文件描述符,一旦某个描述符就绪(一般是读就绪或写就绪),能够通知程序进行相应的读写操作
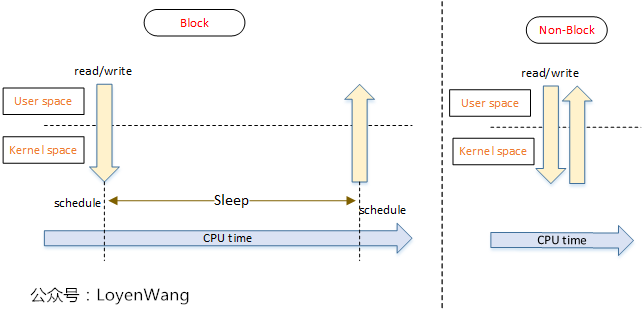
Unix五种IO模型
- blocking IO - 阻塞IO
- nonblocking IO - 非阻塞IO
- IO multiplexing - IO多路复用
- signal driven IO - 信号驱动IO
- asynchronous IO - 异步IO
其中前面4种IO都可以归类为synchronous IO - 同步IO,而select、poll、epoll本质上也都是同步I/O,因为他们都需要在读写事件就绪后自己负责进行读写,也就是说这个读写过程是阻塞的。
与多进程和多线程技术相比,I/O多路复用技术的最大优势是系统开销小,系统不必创建进程/线程,也不必维护这些进程/线程,从而大大减小了系统的开销。
简单来说,select/poll能监听多个设备的文件描述符,只要有任何一个设备满足条件,select/poll就会返回,否则将进行睡眠等待。看起来,select/poll像是一个管家了,统一负责来监听处理了。
select系统调用
kernel/fs/select.c
select系统调用,最终的核心逻辑是在do_select函数中处理的,参考fs/select.c文件;
int do_select(int n, fd_set_bits *fds, struct timespec *end_time)
{
ktime_t expire, *to = NULL;
struct poll_wqueues table;
poll_table *wait;
int retval, i, timed_out = 0;
u64 slack = 0;
unsigned int busy_flag = net_busy_loop_on() ? POLL_BUSY_LOOP : 0;
unsigned long busy_end = 0;
rcu_read_lock();
retval = max_select_fd(n, fds);
rcu_read_unlock();
if (retval < 0)
return retval;
n = retval;
poll_initwait(&table);
wait = &table.pt;
if (end_time && !end_time->tv_sec && !end_time->tv_nsec) {
wait->_qproc = NULL;
timed_out = 1;
}
if (end_time && !timed_out)
slack = select_estimate_accuracy(end_time);
retval = 0;
for (;;) {
unsigned long *rinp, *routp, *rexp, *inp, *outp, *exp;
bool can_busy_loop = false;
inp = fds->in; outp = fds->out; exp = fds->ex;
rinp = fds->res_in; routp = fds->res_out; rexp = fds->res_ex;
for (i = 0; i < n; ++rinp, ++routp, ++rexp) {
unsigned long in, out, ex, all_bits, bit = 1, mask, j;
unsigned long res_in = 0, res_out = 0, res_ex = 0;
in = *inp++; out = *outp++; ex = *exp++;
all_bits = in | out | ex;
if (all_bits == 0) {
i += BITS_PER_LONG;
continue;
}
for (j = 0; j < BITS_PER_LONG; ++j, ++i, bit <<= 1) {
struct fd f;
if (i >= n)
break;
if (!(bit & all_bits))
continue;
f = fdget(i);
if (f.file) {
const struct file_operations *f_op;
f_op = f.file->f_op;
mask = DEFAULT_POLLMASK;
if (f_op->poll) {
wait_key_set(wait, in, out,
bit, busy_flag);
mask = (*f_op->poll)(f.file, wait);
}
fdput(f);
if ((mask & POLLIN_SET) && (in & bit)) {
res_in |= bit;
retval++;
wait->_qproc = NULL;
}
if ((mask & POLLOUT_SET) && (out & bit)) {
res_out |= bit;
retval++;
wait->_qproc = NULL;
}
if ((mask & POLLEX_SET) && (ex & bit)) {
res_ex |= bit;
retval++;
wait->_qproc = NULL;
}
/* got something, stop busy polling */
if (retval) {
can_busy_loop = false;
busy_flag = 0;
/*
* only remember a returned
* POLL_BUSY_LOOP if we asked for it
*/
} else if (busy_flag & mask)
can_busy_loop = true;
}
}
if (res_in)
*rinp = res_in;
if (res_out)
*routp = res_out;
if (res_ex)
*rexp = res_ex;
cond_resched();
}
wait->_qproc = NULL;
if (retval || timed_out || signal_pending(current))
break;
if (table.error) {
retval = table.error;
break;
}
/* only if found POLL_BUSY_LOOP sockets && not out of time */
if (can_busy_loop && !need_resched()) {
if (!busy_end) {
busy_end = busy_loop_end_time();
continue;
}
if (!busy_loop_timeout(busy_end))
continue;
}
busy_flag = 0;
/*
* If this is the first loop and we have a timeout
* given, then we convert to ktime_t and set the to
* pointer to the expiry value.
*/
if (end_time && !to) {
expire = timespec_to_ktime(*end_time);
to = &expire;
}
if (!poll_schedule_timeout(&table, TASK_INTERRUPTIBLE,
to, slack))
timed_out = 1;
}
poll_freewait(&table);
return retval;
}
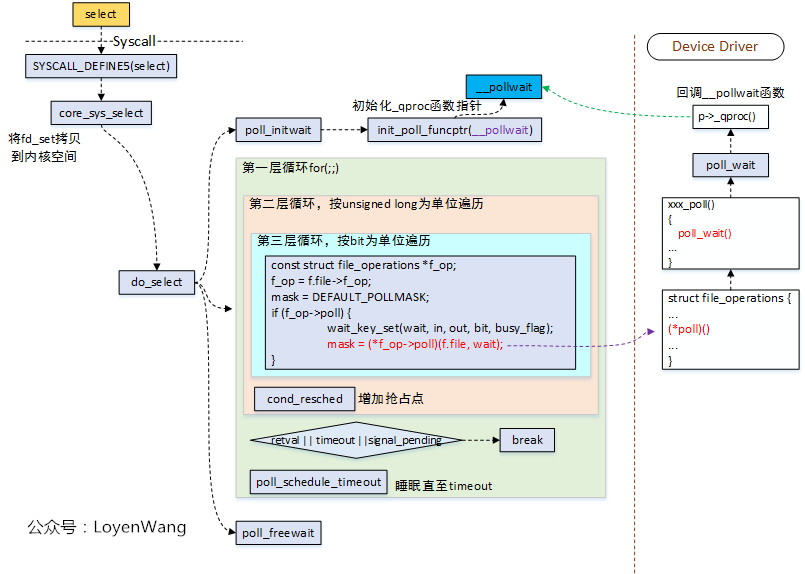
do_select函数中,有几个关键的操作:
- 初始化poll_wqueues结构,包括几个关键函数指针的初始化,用于驱动中进行回调处理;
- 循环遍历监测的文件描述符,并且调用f_op->poll()函数,如果有监测条件满足,则会跳出循环;
- 在监测的文件描述符都不满足条件时,poll_schedule_timeout让当前进程进行睡眠,超时唤醒,或者被所属的等待队列唤醒;
do_select函数的循环退出条件有三个:
- 检测的文件描述符满足条件;
- 超时;
- 有信号要处理;
在设备驱动程序中实现的poll()函数,会在do_select()中被调用,而驱动中的poll()函数,需要调用poll_wait()函数,poll_wait函数本身很简单,就是去回调函数p->_qproc(),这个回调函数正是poll_initwait()函数中初始化的__pollwait();
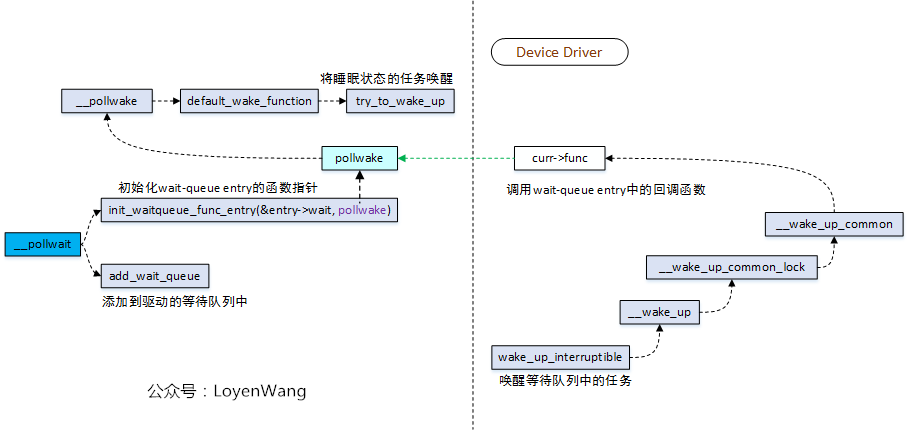
其实就是驱动向select维护的struct poll_wqueue中注册,并将调用select的任务添加到驱动的等待队列中,以便在合适的时机进行唤醒。所以,本质上来说,这是基于等待队列的机制来实现的。
ioctl
ioctl 是设备驱动程序中设备控制接口函数,一个字符设备驱动通常会实现设备打开、关闭、读、写等功能,在一些需要细分的情境下,如果需要扩展新的功能,通常以增设 ioctl() 命令的方式实现。
kernel/drivers/tty/tty_io.c
/*
* Split this up, as gcc can choke on it otherwise..
*/
long tty_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct tty_struct *tty = file_tty(file);
struct tty_struct *real_tty;
void __user *p = (void __user *)arg;
int retval;
struct tty_ldisc *ld;
if (tty_paranoia_check(tty, file_inode(file), "tty_ioctl"))
return -EINVAL;
real_tty = tty_pair_get_tty(tty);
/*
* Factor out some common prep work
*/
switch (cmd) {
case TIOCSETD:
case TIOCSBRK:
case TIOCCBRK:
case TCSBRK:
case TCSBRKP:
retval = tty_check_change(tty);
if (retval)
return retval;
if (cmd != TIOCCBRK) {
tty_wait_until_sent(tty, 0);
if (signal_pending(current))
return -EINTR;
}
break;
}
/*
* Now do the stuff.
*/
switch (cmd) {
case TIOCSTI:
return tiocsti(tty, p);
case TIOCGWINSZ:
return tiocgwinsz(real_tty, p);
case TIOCSWINSZ:
return tiocswinsz(real_tty, p);
case TIOCCONS:
return real_tty != tty ? -EINVAL : tioccons(file);
case FIONBIO:
return fionbio(file, p);
case TIOCEXCL:
set_bit(TTY_EXCLUSIVE, &tty->flags);
return 0;
case TIOCNXCL:
clear_bit(TTY_EXCLUSIVE, &tty->flags);
return 0;
case TIOCGEXCL:
{
int excl = test_bit(TTY_EXCLUSIVE, &tty->flags);
return put_user(excl, (int __user *)p);
}
case TIOCNOTTY:
if (current->signal->tty != tty)
return -ENOTTY;
no_tty();
return 0;
case TIOCSCTTY:
return tiocsctty(tty, file, arg);
case TIOCGPGRP:
return tiocgpgrp(tty, real_tty, p);
case TIOCSPGRP:
return tiocspgrp(tty, real_tty, p);
case TIOCGSID:
return tiocgsid(tty, real_tty, p);
case TIOCGETD:
return tiocgetd(tty, p);
case TIOCSETD:
return tiocsetd(tty, p);
case TIOCVHANGUP:
if (!capable(CAP_SYS_ADMIN))
return -EPERM;
tty_vhangup(tty);
return 0;
case TIOCGDEV:
{
unsigned int ret = new_encode_dev(tty_devnum(real_tty));
return put_user(ret, (unsigned int __user *)p);
}
/*
* Break handling
*/
case TIOCSBRK: /* Turn break on, unconditionally */
if (tty->ops->break_ctl)
return tty->ops->break_ctl(tty, -1);
return 0;
case TIOCCBRK: /* Turn break off, unconditionally */
if (tty->ops->break_ctl)
return tty->ops->break_ctl(tty, 0);
return 0;
case TCSBRK: /* SVID version: non-zero arg --> no break */
/* non-zero arg means wait for all output data
* to be sent (performed above) but don't send break.
* This is used by the tcdrain() termios function.
*/
if (!arg)
return send_break(tty, 250);
return 0;
case TCSBRKP: /* support for POSIX tcsendbreak() */
return send_break(tty, arg ? arg*100 : 250);
case TIOCMGET:
return tty_tiocmget(tty, p);
case TIOCMSET:
case TIOCMBIC:
case TIOCMBIS:
return tty_tiocmset(tty, cmd, p);
case TIOCGICOUNT:
retval = tty_tiocgicount(tty, p);
/* For the moment allow fall through to the old method */
if (retval != -EINVAL)
return retval;
break;
case TCFLSH:
switch (arg) {
case TCIFLUSH:
case TCIOFLUSH:
/* flush tty buffer and allow ldisc to process ioctl */
tty_buffer_flush(tty, NULL);
break;
}
break;
case TIOCSSERIAL:
tty_warn_deprecated_flags(p);
break;
}
if (tty->ops->ioctl) {
retval = tty->ops->ioctl(tty, cmd, arg);
if (retval != -ENOIOCTLCMD)
return retval;
}
ld = tty_ldisc_ref_wait(tty);
retval = -EINVAL;
if (ld->ops->ioctl) {
retval = ld->ops->ioctl(tty, file, cmd, arg);
if (retval == -ENOIOCTLCMD)
retval = -ENOTTY;
}
tty_ldisc_deref(ld);
return retval;
}