资料来源:华金证券-智能驾驶系列
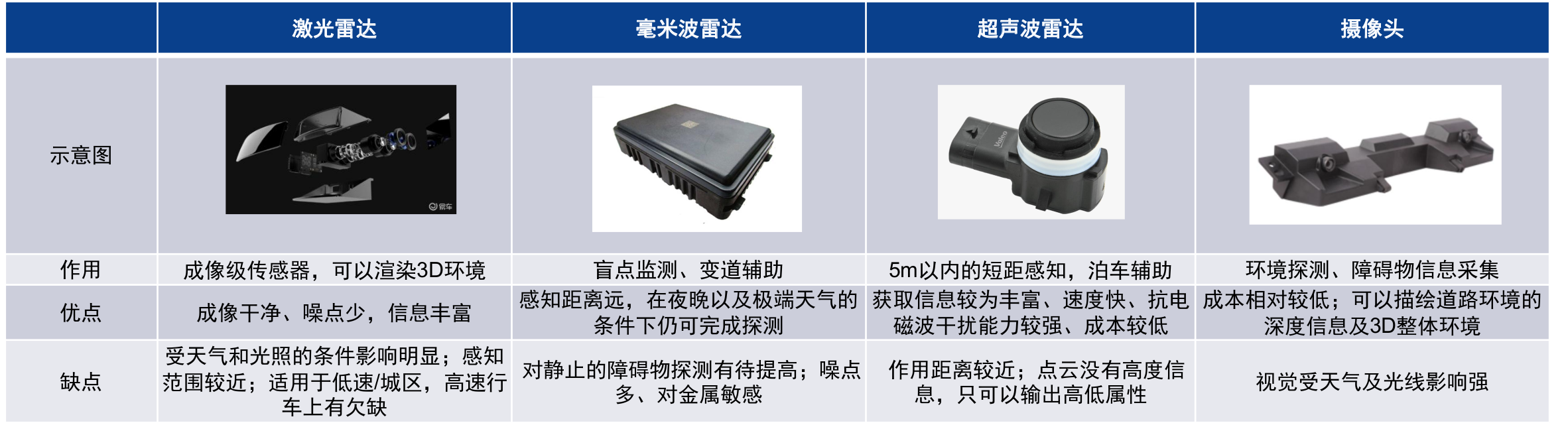
华为-坚持多传感器融合方案


华为坚持多传感器方案,通过激光雷达、毫米波雷达、摄像头等多传感器互补融合感知,以达到在恶劣天气及光线不足情况下仍能有较好的感知识别表现
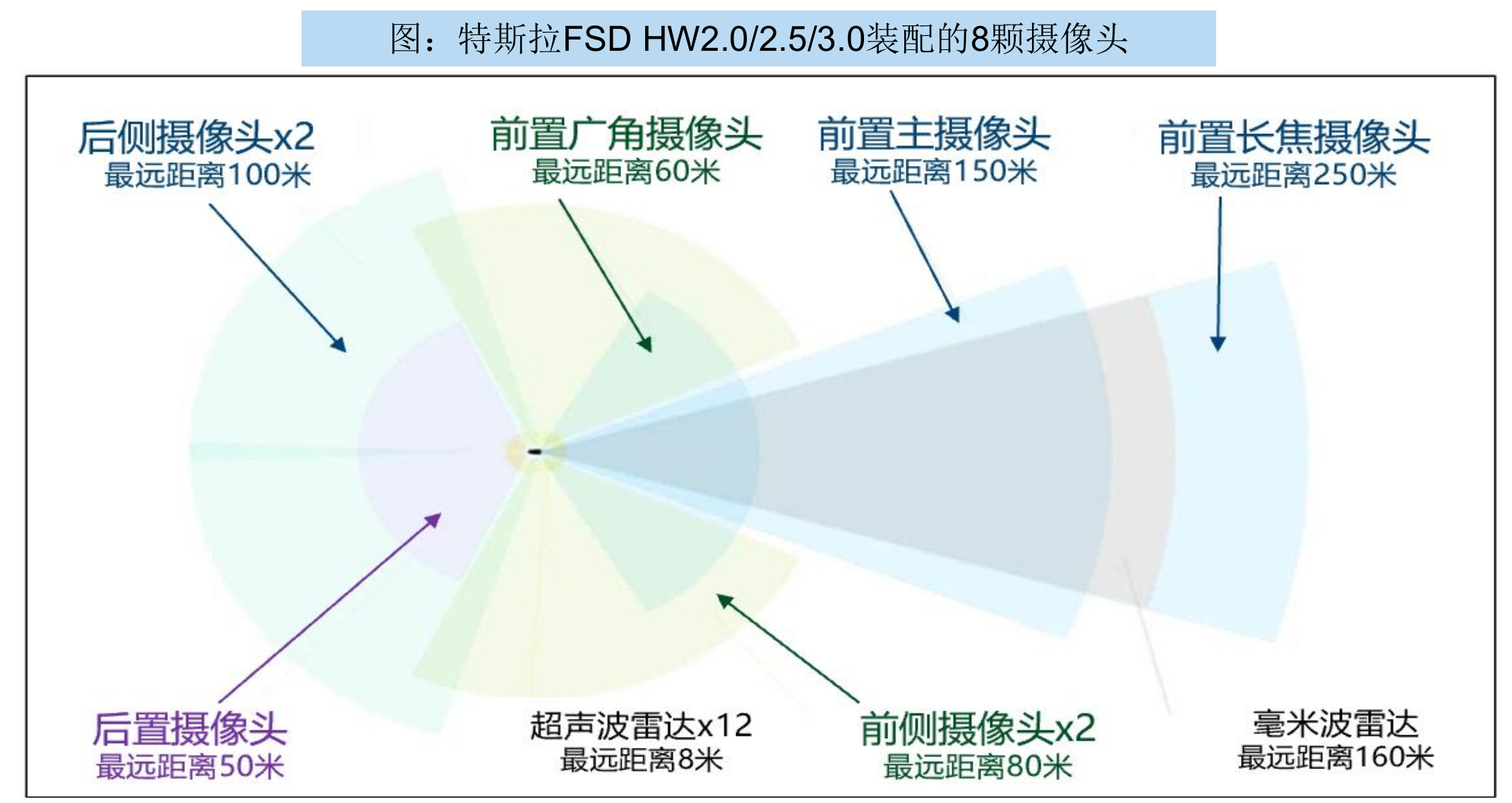
特斯拉-纯视觉方案
- 自动辅助驾驶 AP
- 增强版自动辅助驾驶 EAP
- 完全自动驾驶 FSD
- HW3.0 8颗摄像头
- HW3.0 12颗摄像头 500万像素
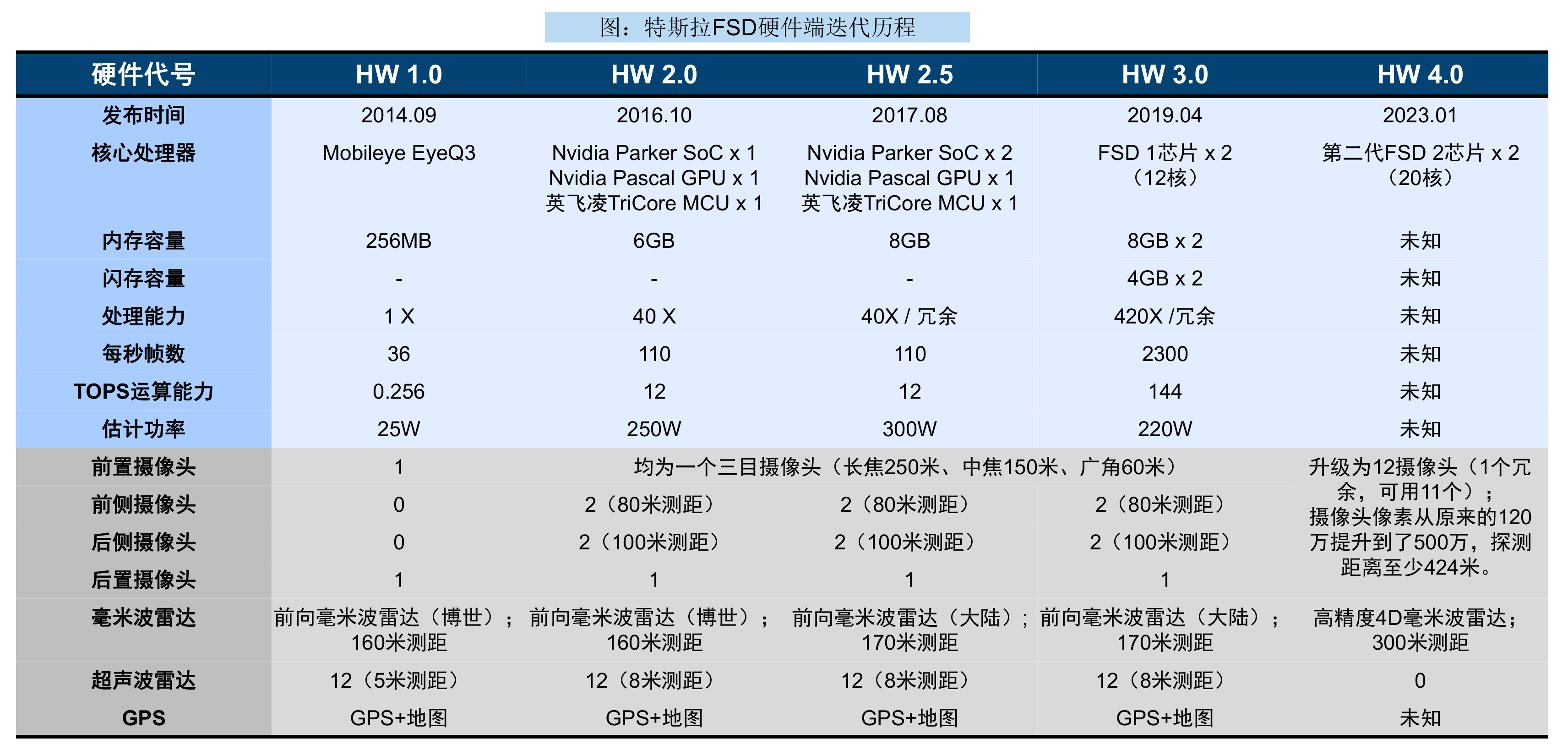
HW4.0
- HW4.0采用三星代工的第二代FSD 7nm制程芯片,算力是HW3.0的3倍以上
- CPU内核从12个增至20个,最大频率为2.35GHz
- 使用12个摄像头(前置双目摄像头新增了2个侧视摄像头、以及1个备用摄像头。)单个高精度4D毫米波雷达、取消超声波传感器
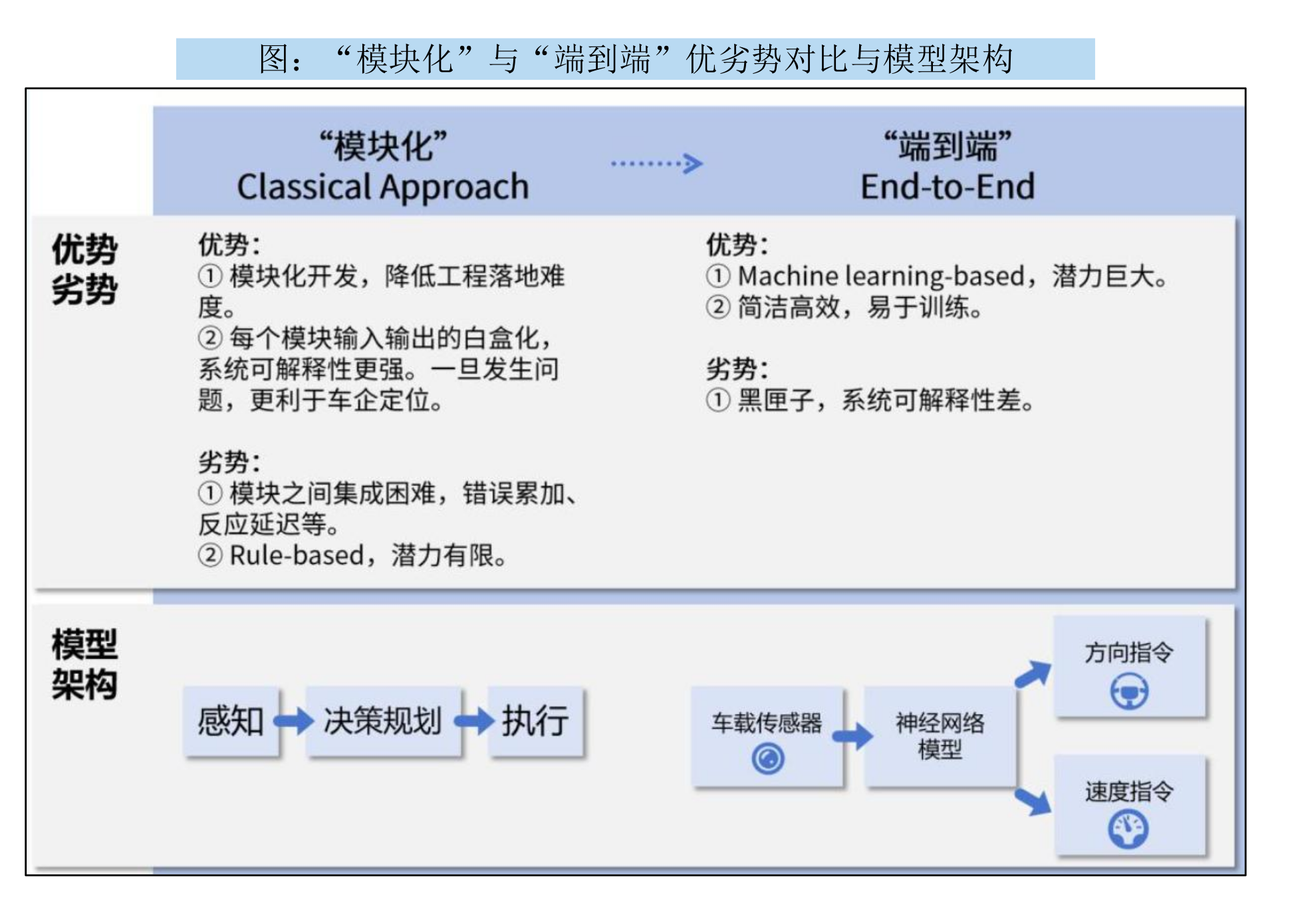
什么是端到端
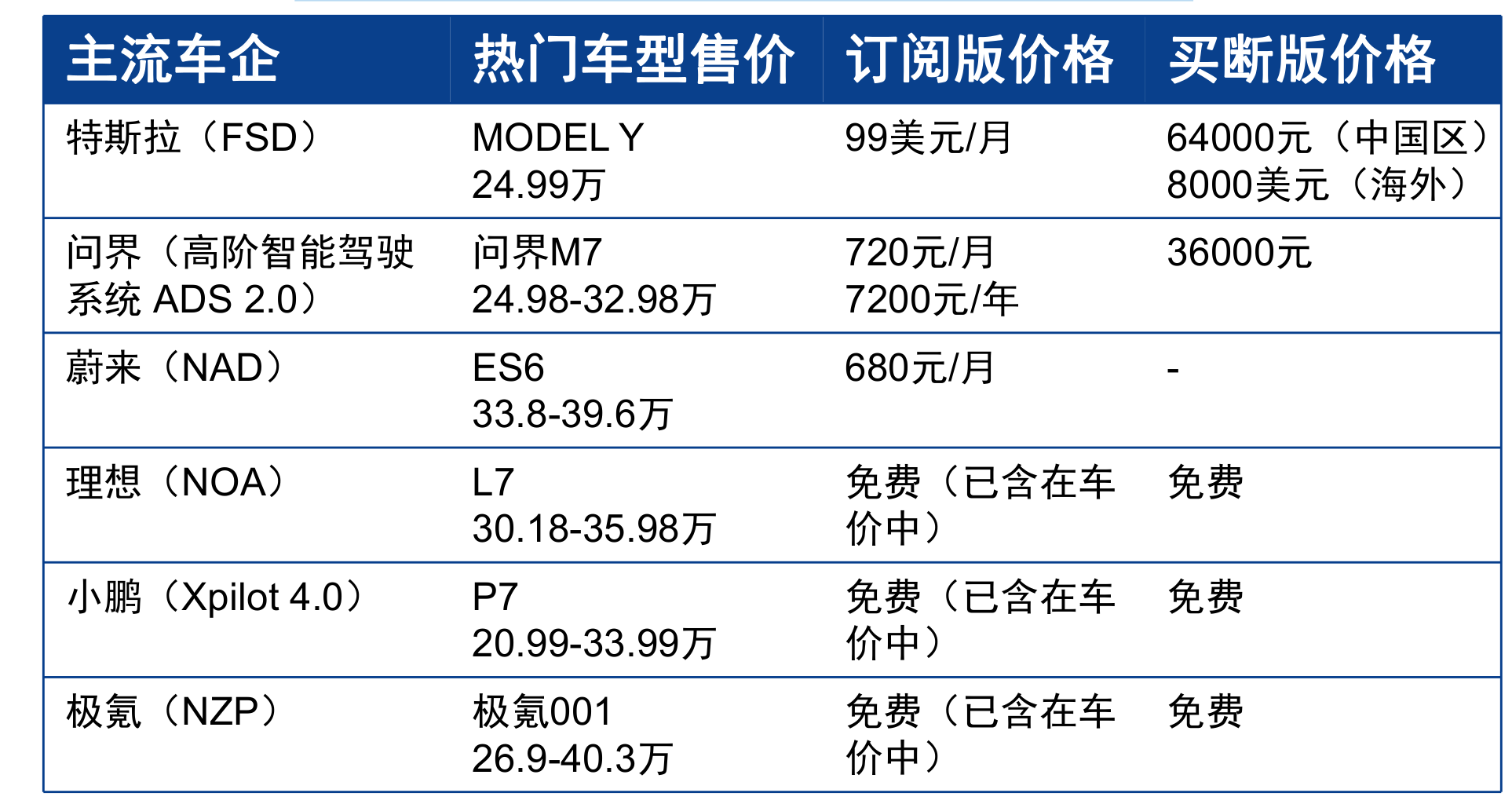
价格
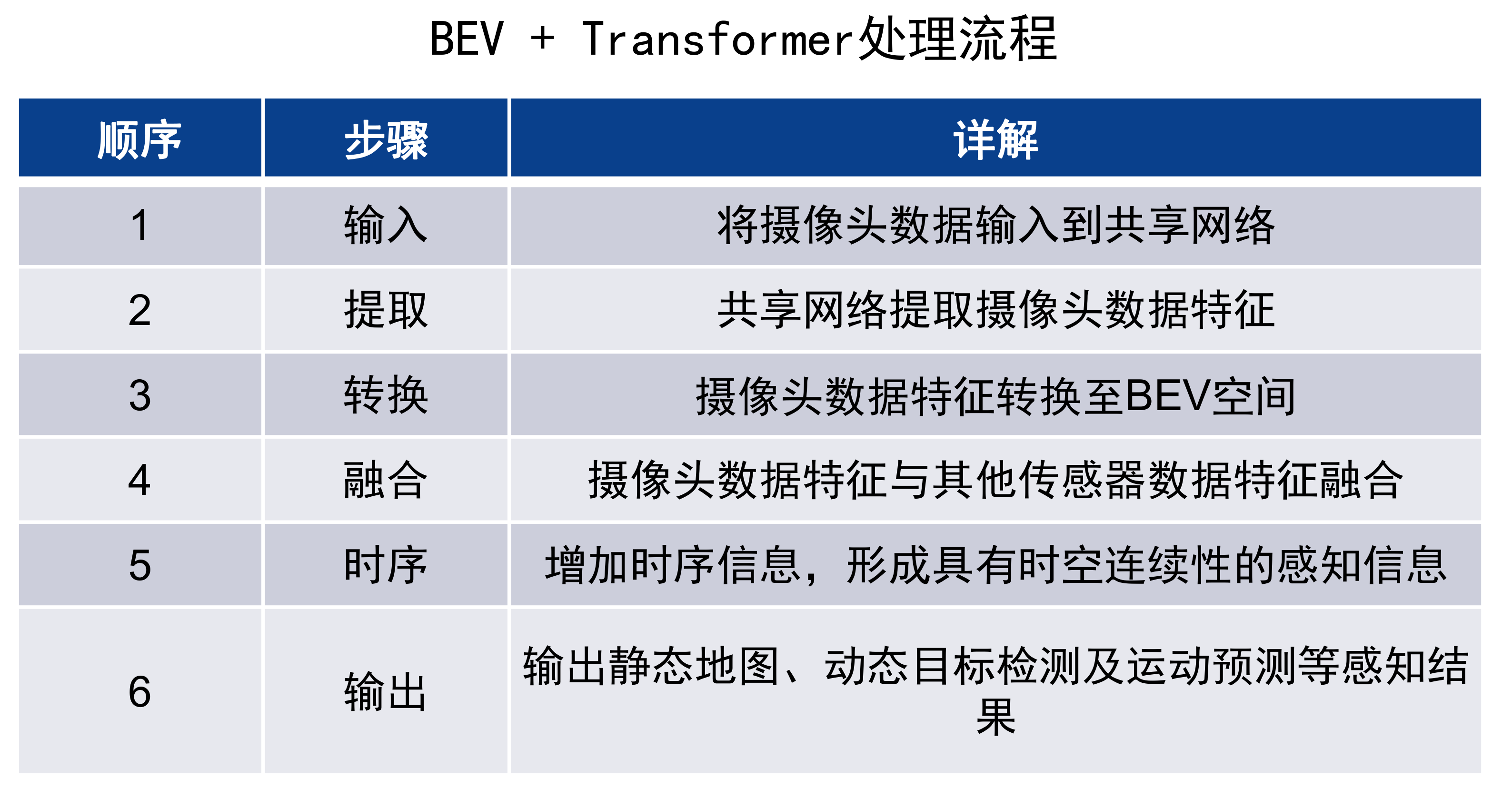
BEV 算法
BEV(Bird’s Eye View,俯视视角) 是一种用于自动驾驶的感知算法,它可以把来自摄像头、雷达等传感器的数据转换成类似“上帝视角”的俯视图,让车辆更直观地“看到”周围的环境。
BEV 的作用就是把“前方视角”转换成“上帝视角”(从上往下看),这样系统可以更清楚地理解车辆和周围环境的相对位置
GOD 算法
GOD(General Occupancy Distribution,通用占用分布)算法是 特斯拉 在其自动驾驶系统中使用的一种新型环境感知算法。它的主要目标是 构建一个更加精准的三维世界模型,帮助自动驾驶系统更好地理解周围环境。
核心理念是 不再依赖物体分类,而是专注于整个环境的占用情况,让自动驾驶系统拥有更完整的 3D 世界理解能力。这种方法能让车辆更安全地应对复杂场景,成为特斯拉 FSD(全自动驾驶)系统的重要组成部分。
GOD 算法 vs GPU 渲染游戏画面对比
| 对比维度 | GOD 算法(自动驾驶) | GPU 渲染(游戏) |
|---|---|---|
| 核心目标 | 预测并理解真实世界的 3D 占用情况,构建自动驾驶环境模型 | 生成逼真的 3D 游戏画面,提供沉浸式视觉体验 |
| 数据来源 | 摄像头、毫米波雷达、激光雷达等传感器 | 预设 3D 模型、贴图、光照、物理引擎 |
| 关键计算方式 | 深度学习推理 + 3D 占用网格 | 3D 渲染管线(光栅化、着色、光照计算) |
| 空间建模方式 | 生成占用网格(Occupancy Grid),预测可行驶区域 | 构建 3D 场景,确定物体位置、碰撞检测 |
| 光栅化(Rasterization) | 计算 3D 物体在 2D 画面中的占用情况 | 将 3D 模型转换为 2D 屏幕像素 |
| 深度学习/光照计算 | 使用神经网络预测未观测到的障碍物、车辆 | 计算光照、阴影、反射等渲染效果 |
| 连续帧预测 | 计算环境变化,预测下一帧物体可能位置 | 计算物体运动、动画帧过渡 |
| 物理碰撞检测 | 通过 3D 占用网格预测障碍物、道路边界等 | 使用 BVH(包围体层次结构)、Occlusion Culling 提高渲染效率 |
| 实时性要求 | 毫秒级决策,直接影响自动驾驶安全 | 以帧率(FPS)为准,目标是流畅画面 |
| 最终输出 | 可行驶区域、障碍物分布、环境预测 | 逼真的 3D 画面,带有纹理、光影、特效 |
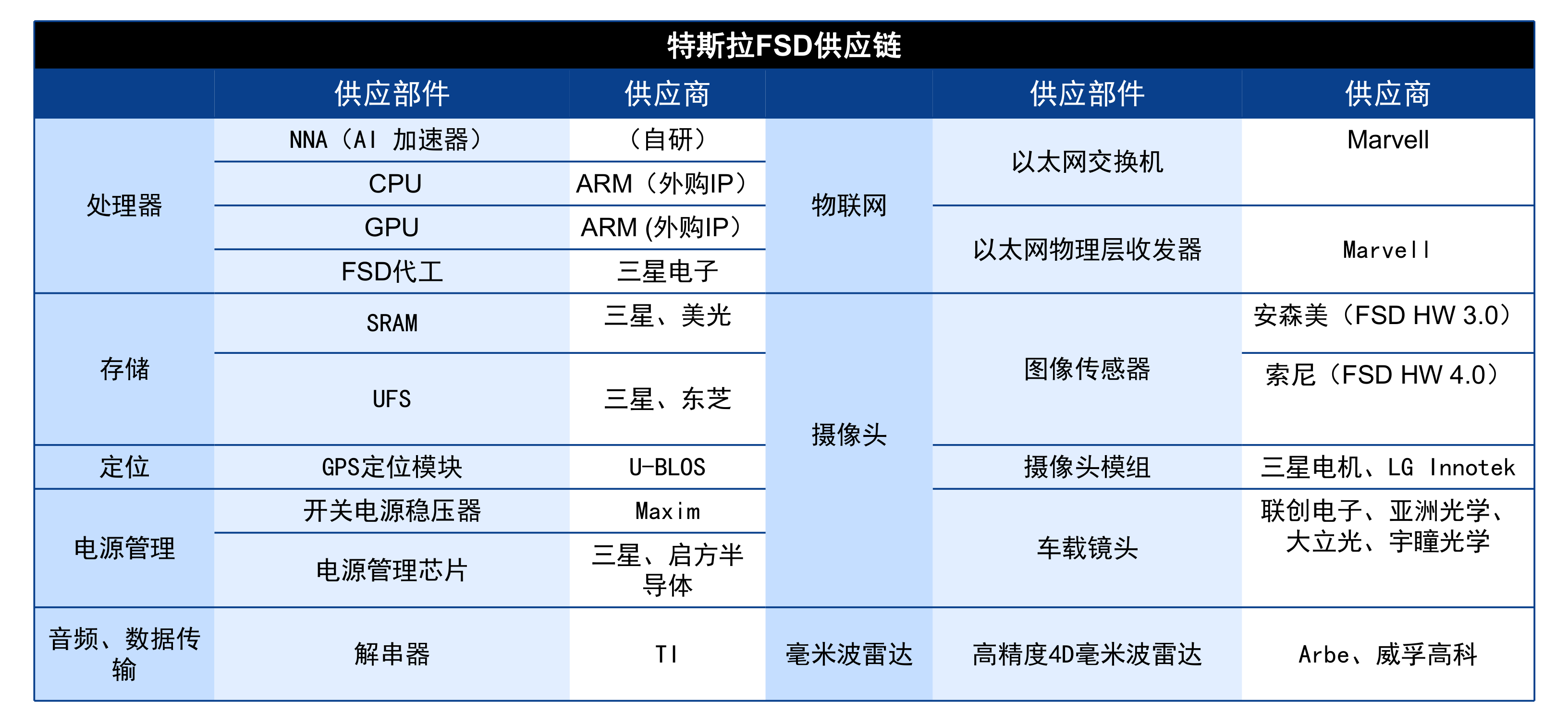
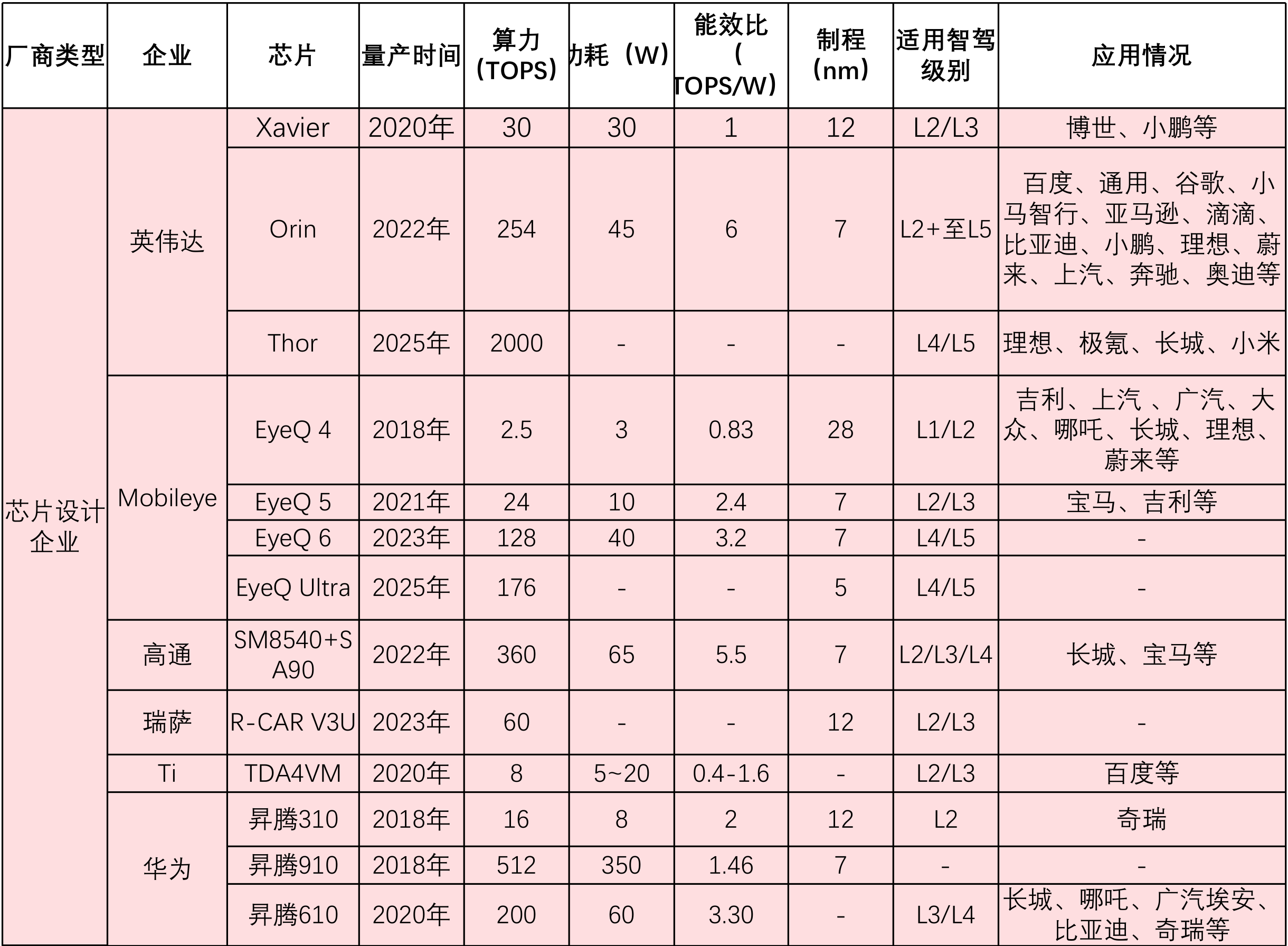
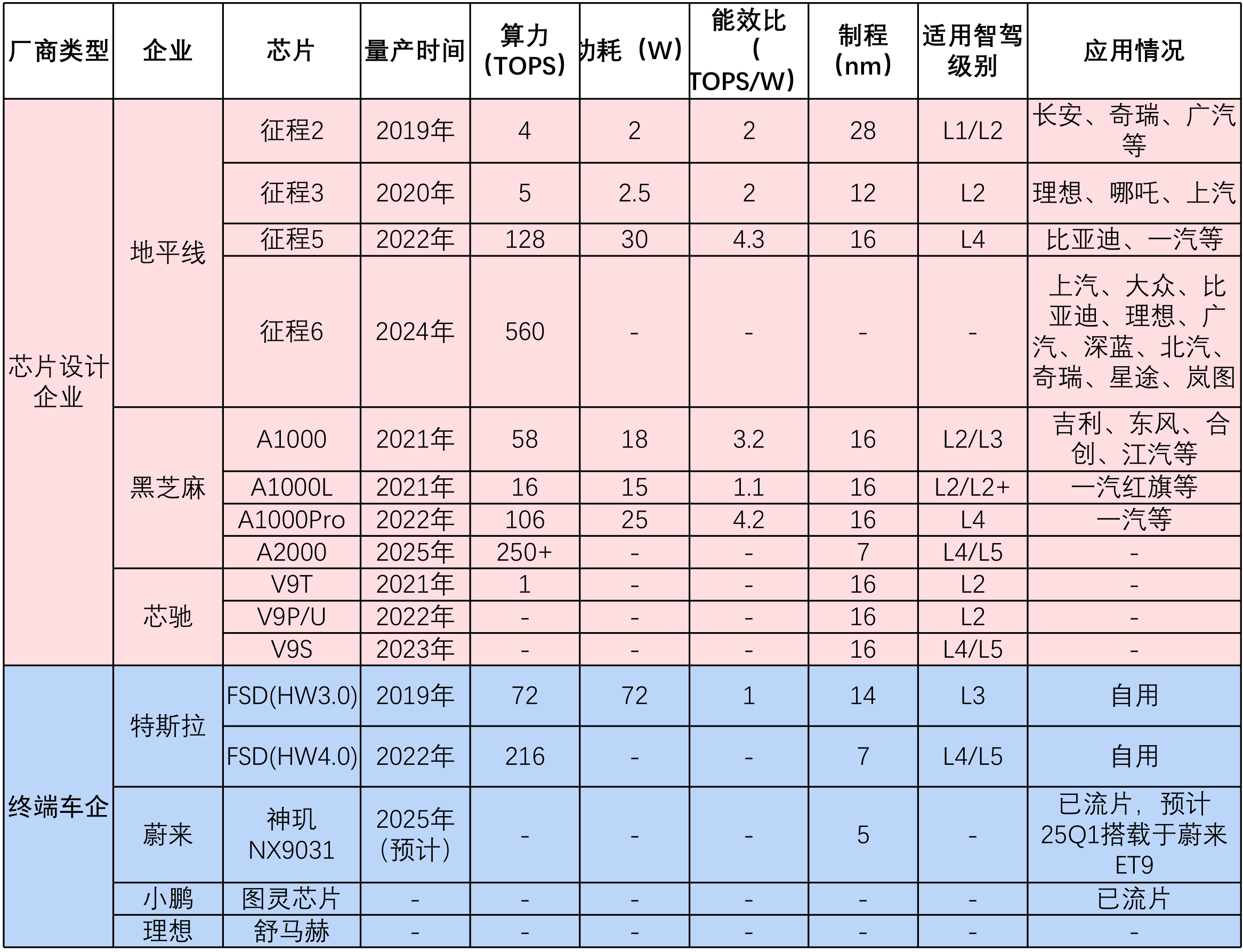
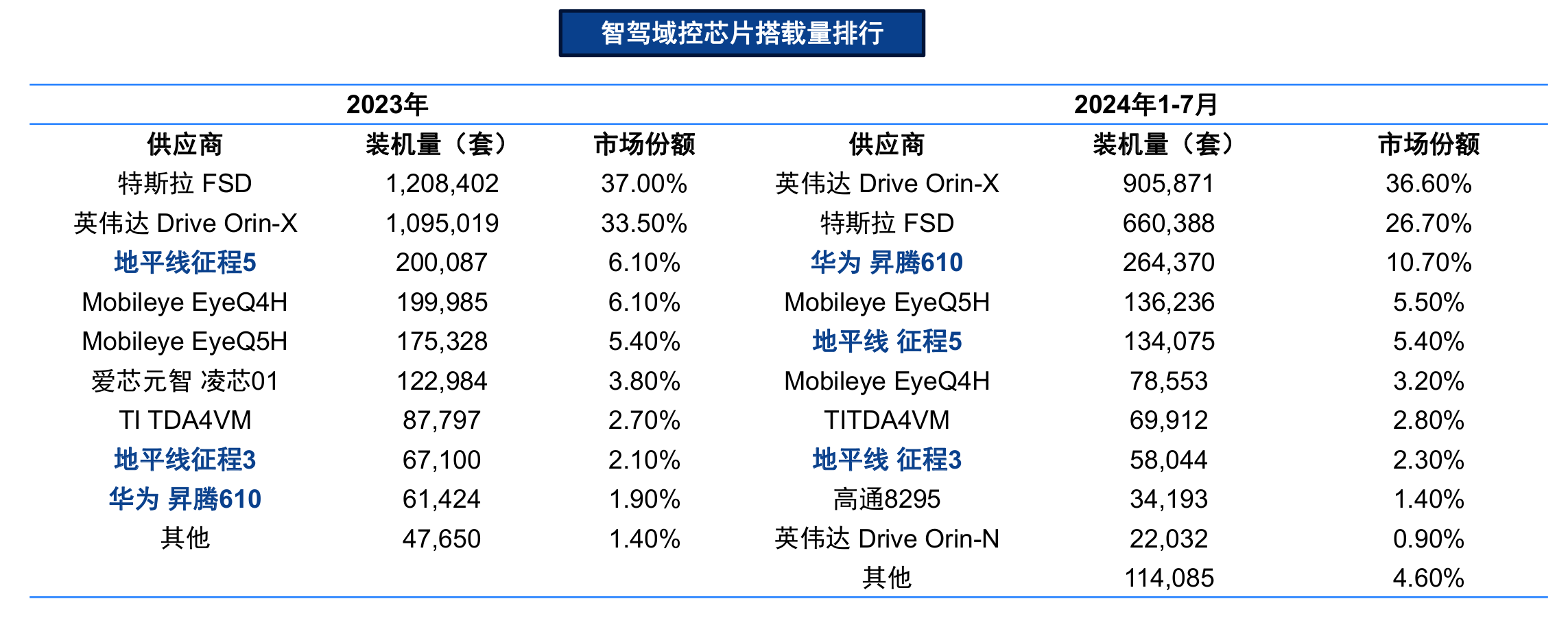
自动驾驶芯片
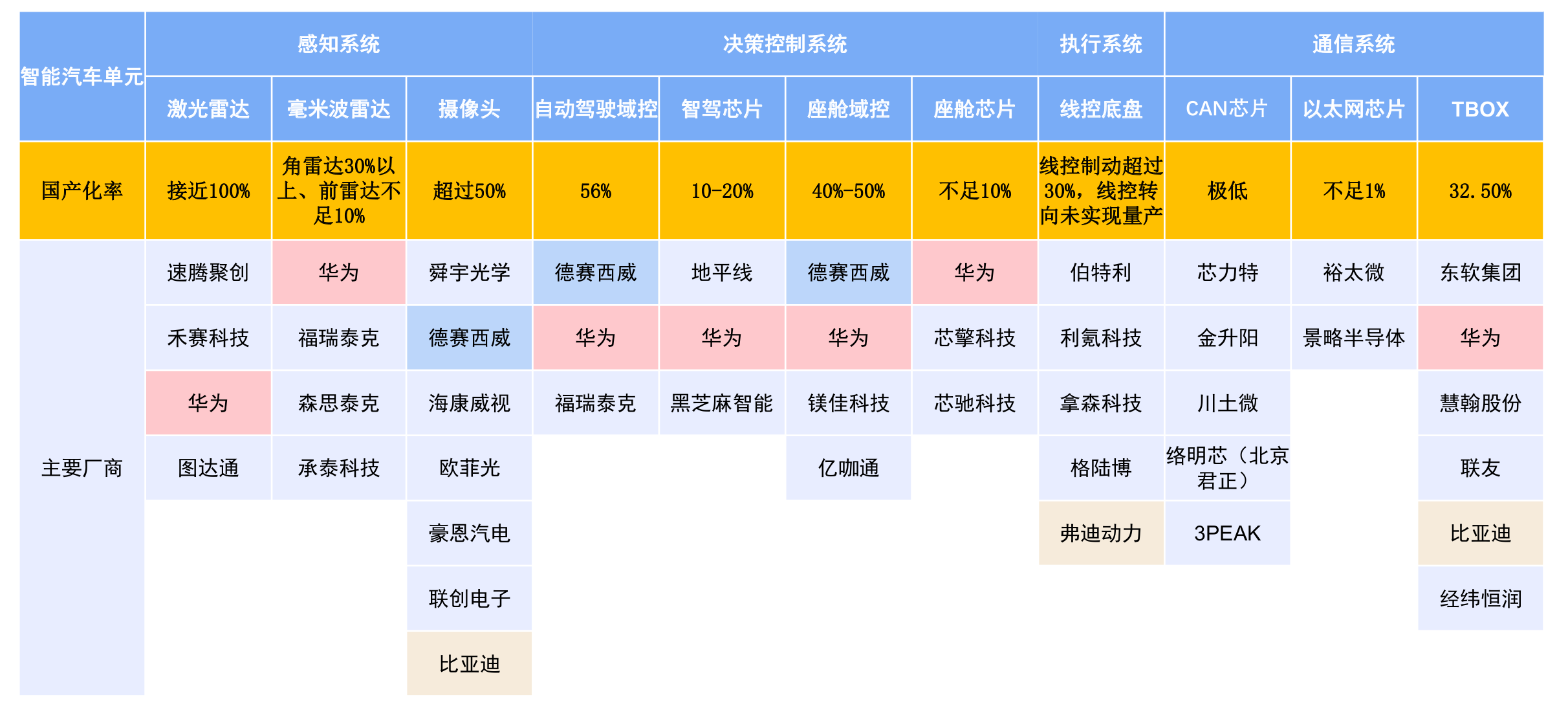
零部件国产化率
0
次点赞