分类
- 人行道小型无人车
- 机动车道大型无人车
国内企业
| 类型 | 企业 | 产品/服务 | 应用场景 | 自动驾驶等级 | 部署规模 / 备注 |
|---|---|---|---|---|---|
| 无人配送车制造与运营 | 新石器科技(New Stone Robot) | 城市末端及园区配送车 | 快递、商超、社区配送 | L4 | 多家快递企业合作,数千台投放 |
| 无人配送车制造与运营 | 白犀牛智达(White Rhino) | 无人配送车辆及运营方案 | 城市末端配送 | L4 | 与顺丰合作部署,数百台 |
| 无人配送车制造与运营 | 九识智能(Jushi Intelligent) | 无人配送车及运营服务 | 城配物流、商超、生鲜 | L4 | 已服务数千企业,部署数千台 |
| 无人配送车制造与运营 | 行深智能(DeepDrive) | 无人车整机与方案 | 快递、园区、社区配送 | L4 | 与京东、美团、中国邮政合作 |
| 无人配送车制造与运营 | ZELOS(泽洛斯) | 城市无人配送车 | 城市末端配送 | L4 | 新兴品牌,产能与海外部署增长快 |
| 物流平台自建队伍 | 菜鸟网络(Cainiao) | L4 无人配送车 | 末端社区、园区、城市站点间 | L4 | 多地上路,规模化推广中 |
| 物流平台自建队伍 | 京东物流(JD Logistics) | 智能无人配送车 | 社区、园区、城市配送 | L4 | 全国多城市,数百到千级车辆 |
| 物流平台自建队伍 | 顺丰控股 | 自研/合作无人配送车 | 末端配送 | L4 | 多城市部署,数百台 |
| 自动驾驶技术供应商 | DeepRoute.ai(元戎启行) | 自动驾驶软件与感知规划 | 可集成到无人配送车 | L4 | 技术输出,无整车部署 |
| 自动驾驶技术供应商 | 小马智行(Pony.ai) | 自动驾驶平台 | 可集成到无人配送车 | L4 | 技术输出及部分测试车辆 |
美国企业
| 企业 | 代表产品 / 主要类型 | 核心功能与应用场景 | 备注 |
|---|---|---|---|
| Nuro | 车路级无人配送车 | 全自主无人车用于包裹/食品/杂货配送 | 最早获得美国多州路测许可,适合街道级中等载重配送(grocery) |
| Starship Technologies | 小型人行道配送机器人 | 自动在人行道进行包裹/餐食/日用品配送 | 已在校园及城市社区大规模部署 |
| Serve Robotics | 自主人行道配送机器人 | 城市/餐食配送(与Uber Eats等合作) | 部署数千台,已在多个大城市及平台联动 |
| Avride | 侧重校园与城市配送机器人 | 自动食品/包裹递送,合作平台如 Grubhub & Uber Eats | 已在大学校园与城市推出多机器人车辆 |
| Cartken | 自主配送机器人 | 校园/商区送货,与Uber Eats/Grubhub对接 | 数十万次配送记录 |
| Coco Robotics | 城市/人行道送货机器人 | 与DoorDash合作,做最后一英里配送 | 在洛杉矶等地完成试点部署 |
| Udelv | 自动驾驶配送卡车 | 中到大载重最后一公里货物配送 | 采用模块化配送舱的无人驾驶货运车 |
| Clevon | 城市级配送电动机器人 | 城市与郊区无人物流任务 | 与物流公司合作,支持多包裹运输 |
| Ottonomy.IO | Ottobot 配送机器人 | 可用于室内外配送场景(商场/校园/社区) | 通用服务机器人平台 |
| DoorDash (Dot) | Dot 自主配送机器人 | 配合DoorDash平台执行轻量小订单配送 | 平台自有配送机器人扩展模式 |
中美对比
- 中国:偏向中大型无人配送车,技术成熟,部署规模大,主要依托物流巨头商业化落地。
- 美国:偏向小型人行道配送机器人,试点为主,校园/社区应用多,政策分散,规模小,但创新灵活
技术架构
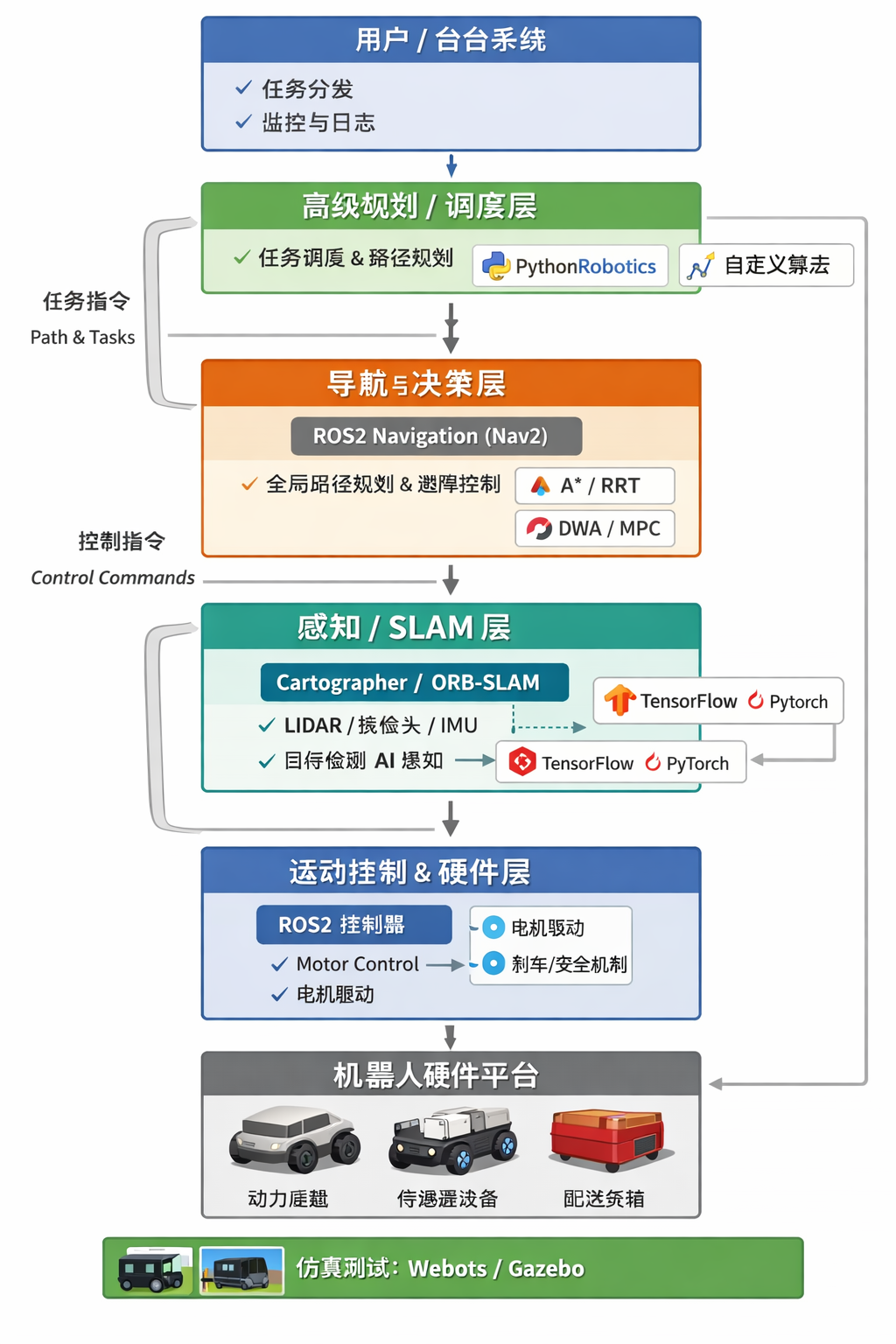
┌───────────────────────────────┐
│ 用户 / 后台系统 │
│ - 任务分发(配送订单/目的地) │
│ - 监控与日志 │
└──────────────┬────────────────┘
│ 任务/状态
┌──────────────┴───────────────┐
│ 高级规划 / 调度层 │
│ - PythonRobotics / 自定义调度 │
│ - 任务优化(订单排序、路径规划) │
└──────────────┬───────────────┘
│ 路径 /控制指令
┌──────────────┴───────────────┐
│ 导航与决策层(ROS2) │
│ - 全局路径规划(Nav2 / A*, RRT)│
│ - 局部避障(DWA / MPC) │
│ - 行为决策(避障策略、速度策略) │
└──────────────┬───────────────┘
│ 控制指令
┌──────────────┴───────────────┐
│ 感知层 / SLAM层 │
│ - LiDAR / 摄像头 / IMU │
│ - SLAM(Cartographer / ORB-SLAM) │
│ - 障碍物检测(PyTorch/TensorFlow) │
└──────────────┬───────────────┘
│ 位姿 / 障碍信息
┌──────────────┴───────────────┐
│ 车辆控制层 / 硬件接口 │
│ - ROS2 控制器(轮速、舵机) │
│ - 电机驱动 / 电池管理 │
│ - 安全机制:刹车/限速/紧急停止 │
└──────────────┬───────────────┘
│ 执行动作
┌──────────────┴───────────────┐
│ 机器人硬件平台 │
│ - 商用底盘 / 自制底盘 │
│ - 电机 / 电池 / 传感器 │
│ - 货箱 / 末端执行机构 │
└───────────────────────────────┘
使用的开源项目
| 架构层 | 开源项目 | 功能说明 |
|---|---|---|
| 高级规划 / 调度 | PythonRobotics | 全局任务调度、路径优化、算法原型 |
| 导航与决策 | ROS2 Navigation (Nav2) | 全局路径规划 + 局部避障、行为决策 |
| 感知 / SLAM | Cartographer / ORB-SLAM | 地图构建、定位、导航基础 |
| 障碍检测 / AI感知 | PyTorch / TensorFlow | 实时障碍物识别、语义分割 |
| 仿真测试 | Webots / Gazebo | 仿真验证导航、避障、控制 |
| 车辆控制 / 硬件接口 | ROS2 控制器 | 电机、舵机控制,安全机制 |
| 硬件平台 | 商用底盘或自制机器人车体 | 安装传感器、电机、货箱,执行动作 |
风险点
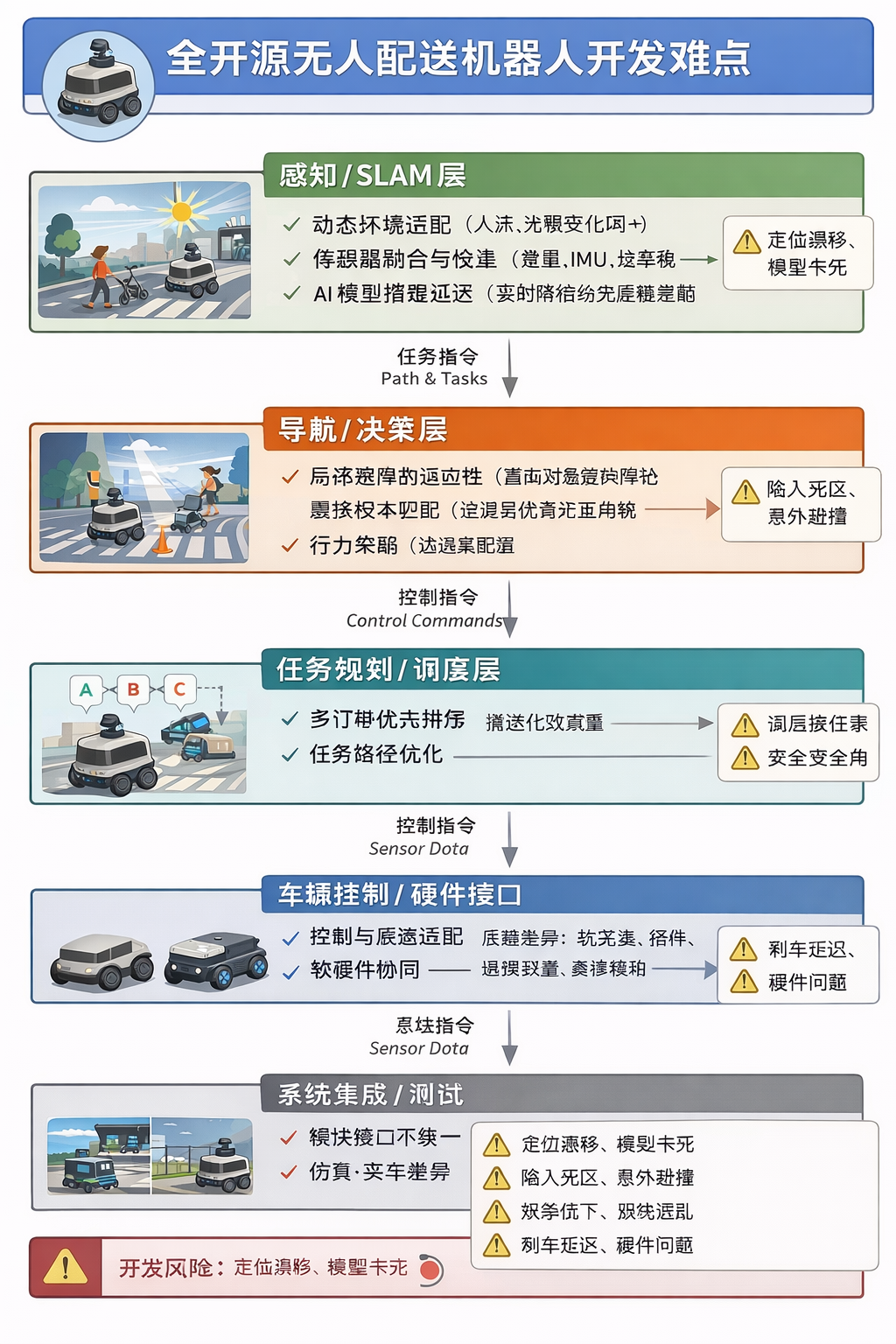
感知与 SLAM 层
难点:环境适应性和稳定性
SLAM 稳定性:开源 SLAM(Cartographer/ORB-SLAM)在静态环境表现很好,但面对:
- 动态环境(行人、自行车、其他机器人)
- 光照变化(室内外切换、阴影)
- 地面纹理缺失(空旷道路)
都可能导致定位漂移或地图错误。
传感器融合:
- LiDAR + 摄像头 + IMU 数据同步和标定非常关键,任何标定误差都可能导致路径偏差。
障碍物识别 AI 模型部署:
- TensorFlow/PyTorch 模型需要在低算力平台(Jetson、NPU)上推理,可能会出现延迟或丢帧。
导航与决策层
难点:局部避障与动态行为决策
ROS2 Navigation (Nav2) 提供全局/局部规划,但开源算法对复杂动态环境(人群、车辆)仍有限:
- 局部避障容易陷入死区(局部最优路径问题)
- 高速场景下避障延迟可能导致碰撞
行为决策算法需要考虑:
- 优先级(先送近的还是先避障?)
- 安全边界(最小安全距离、紧急制动)
高级规划 / 调度层
难点:任务优化和路径生成
PythonRobotics 提供算法示例,但真实配送任务涉及:
- 多目标任务(多订单同时配送)
- 动态订单增加/取消
- 路径优化需要兼顾效率与安全
车辆控制层 / 硬件接口
难点:软硬件协同与安全
- ROS2 控制器需要与底盘电机、刹车、安全装置紧密配合
- 开源算法输出的速度指令必须经过限速、加速度限制、安全过滤才能执行
- 不同底盘硬件接口差异大,需要自定义驱动
系统集成与仿真测试
各模块都是开源独立项目:
- 数据接口格式可能不同
- 通信协议需要统一(ROS2 topic、service)
仿真验证(Webots / Gazebo)环境与真实场景差异:
- 传感器噪声
- 动态障碍物行为
0
次点赞