Launch 文件
# ROS2 乌龟模仿启动文件
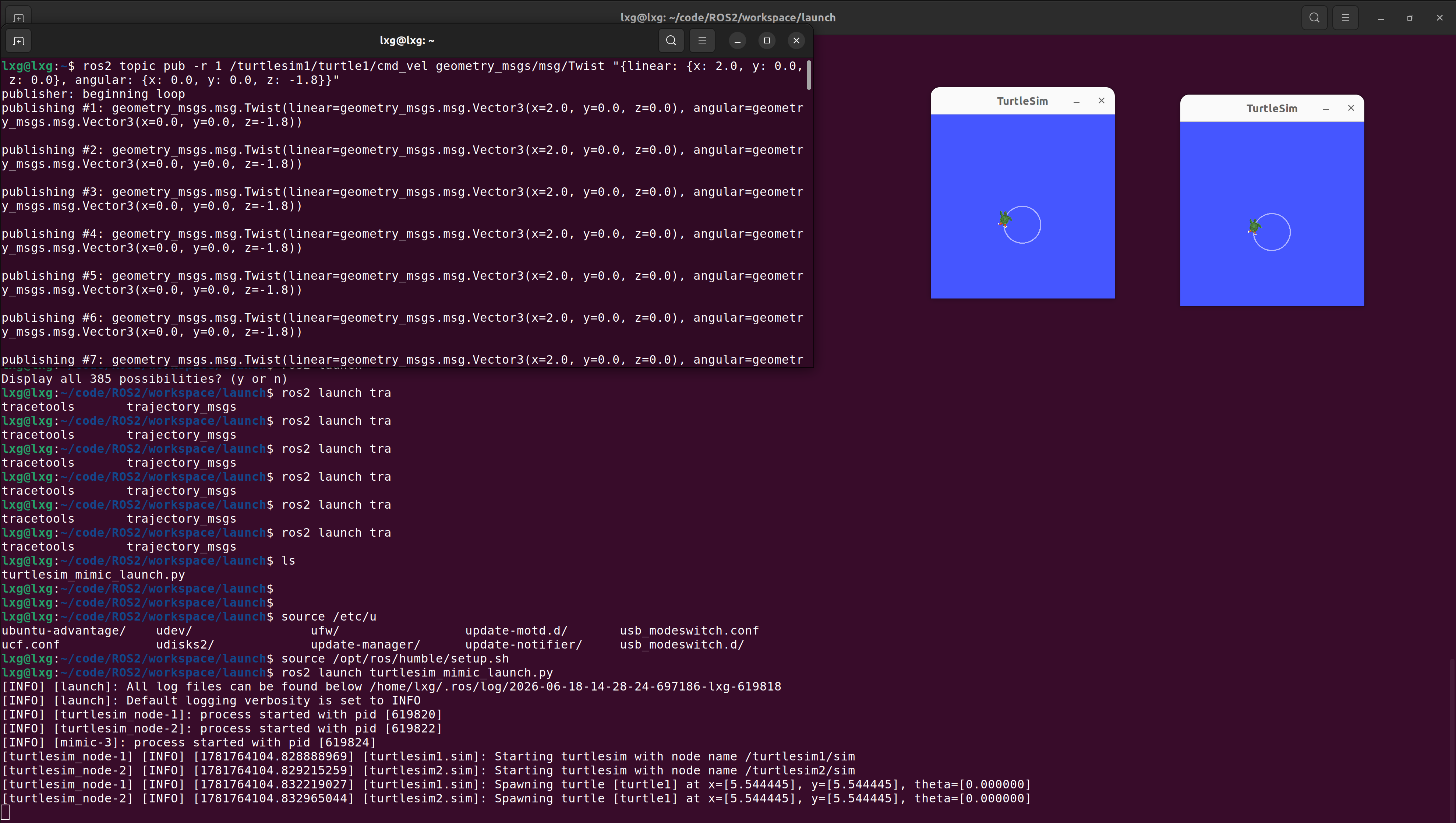
# 该文件启动两个独立的乌龟仿真器,第二个乌龟自动模仿第一个乌龟的运动
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
"""
生成ROS2启动配置
启动3个节点:
1. turtlesim1: 第一个乌龟仿真窗口(主乌龟)
2. turtlesim2: 第二个乌龟仿真窗口(被控乌龟)
3. mimic: 模仿节点,使第二个乌龟跟随第一个乌龟
"""
return LaunchDescription([
# 第一个乌龟仿真器节点 - 作为主乌龟(可手动控制)
Node(
package='turtlesim', # 所在ROS包名
namespace='turtlesim1', # 命名空间,用于隔离话题
executable='turtlesim_node', # 可执行文件名
name='sim' # 节点名称
),
# 第二个乌龟仿真器节点 - 作为被控乌龟(自动跟随)
Node(
package='turtlesim', # 所在ROS包名
namespace='turtlesim2', # 命名空间,与第一个隔离
executable='turtlesim_node', # 可执行文件名
name='sim' # 节点名称
),
# 模仿节点 - 读取第一个乌龟位置,控制第二个乌龟运动
Node(
package='turtlesim', # 所在ROS包名
executable='mimic', # 模仿可执行程序
name='mimic', # 节点名称
remappings=[
# 话题重映射:将模仿节点的输入与第一个乌龟的位置话题关联
('/input/pose', '/turtlesim1/turtle1/pose'),
# 话题重映射:将模仿节点的输出与第二个乌龟的速度命令话题关联
('/output/cmd_vel', '/turtlesim2/turtle1/cmd_vel'),
]
)
])
对比安卓系统理解
| Android | ROS2 |
|---|---|
| init.rc | launch.py |
| service | Node |
| property | LaunchArgument |
| import rc | IncludeLaunchDescription |
| system_server | Component Container |
TF2-Transform(坐标变换)
TF2 = ROS2 中的坐标系管理框架-管理多个坐标系之间的关系
0
次点赞